En Centre d’Estudis Edukat te ayudamos a estudiar las asignaturas de los ciclos técnicos de formación profesional (FPro) de química, electricidad, electrónica, etc.
Estamos en Hospitalet de Llobregat.
Las clases son personalizadas en grupos reducidos de 4 ó 5 personas.
Solicitad más información enviando el siguiente formulario:
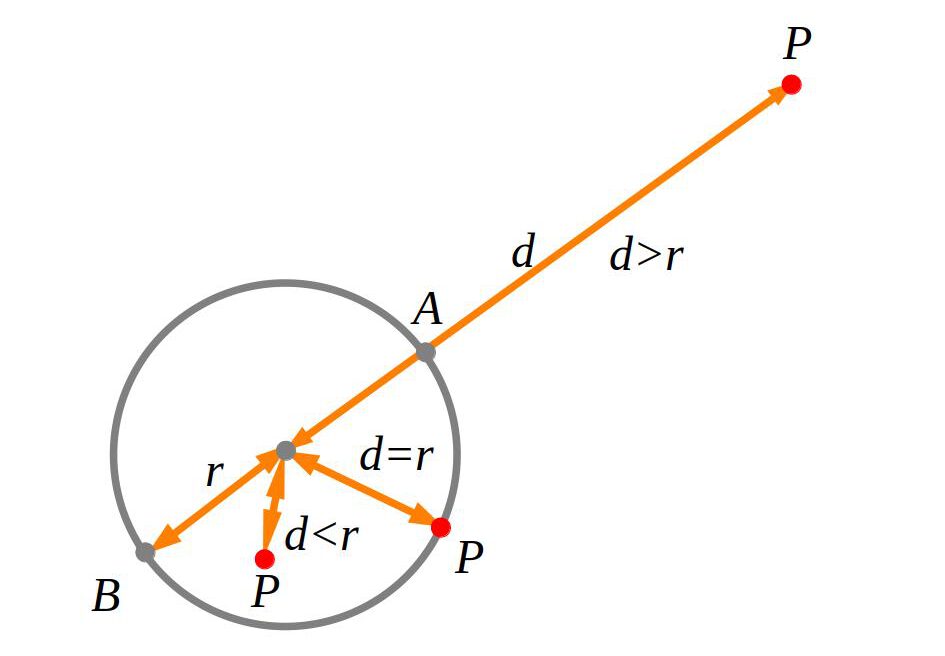
La potència d’un punt P respecte a una circumferència és: \[\overline{PA} \cdot \overline{PB}=d²-r²\]. El punt pot ser exterior, interior o de la circumferència.
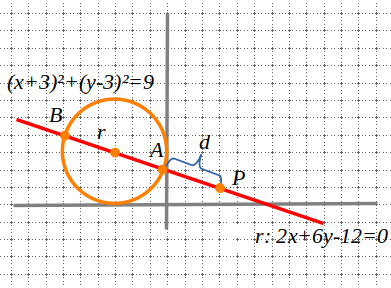
Si ens donen un punt i l’equació d’una circumferència, per a calcular al distància d haurem de trobar l’equació de la recta i els punts d’intersecció amb la circumferència fent un sistema d’equacions no lineals. També haurem de recordar els coneixements de vectors en el pla per a calcular les distàncies.
El procediment que hem de seguir és:
Trobem el centre i el radi de la circumferència i determinem si el punt és exterior, interior o de la circumferència.
Calculem l’equació de la recta que passa pel punt P i el punt del centre de la circumferència.
Trobem els punts d’intersecció de la circumferència i la recta.
Calculem la distància d i la potència de P a la circumferència.
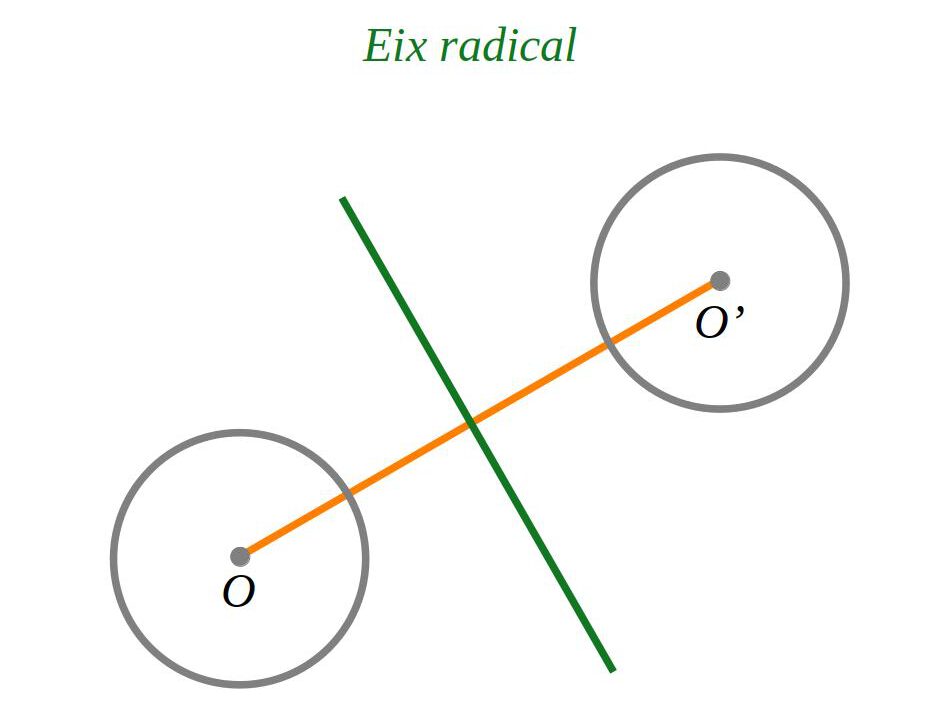
L’eix radical de dues circumferències és el lloc geomètric dels punts que tenen la mateixa potència respecte a cada circumferència. És una recta perpendicular a la recta que uneix el centres de cada circumferència.
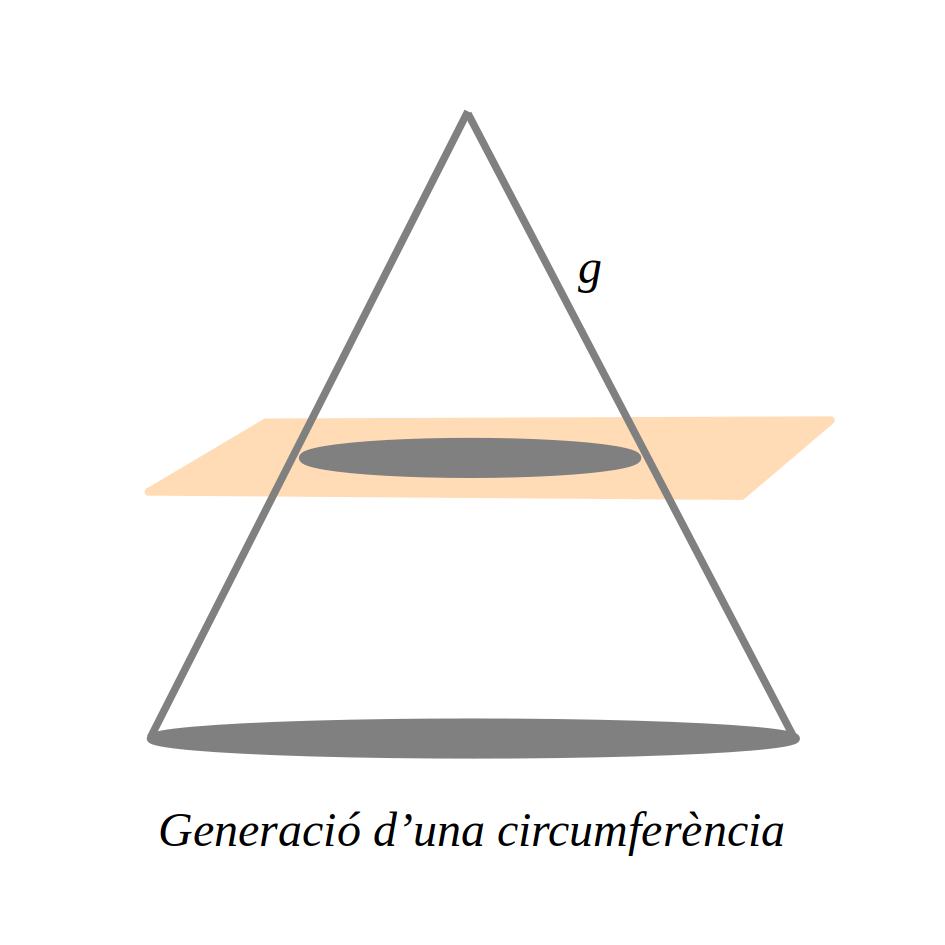
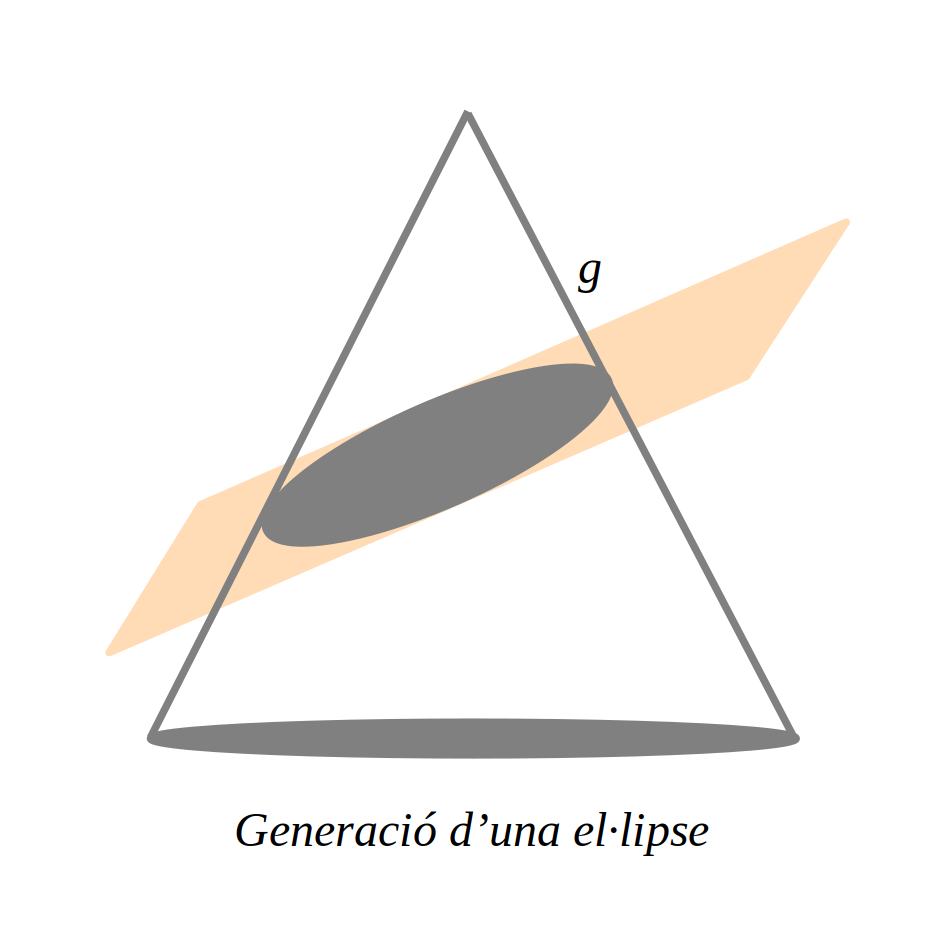
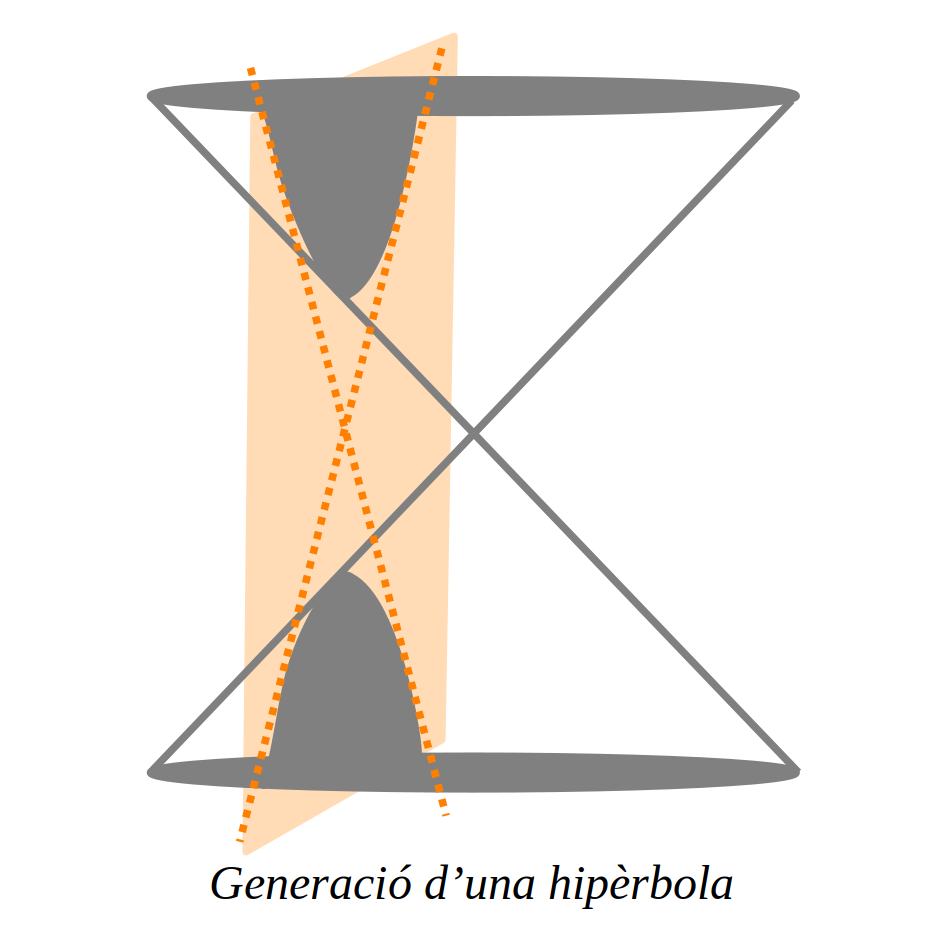
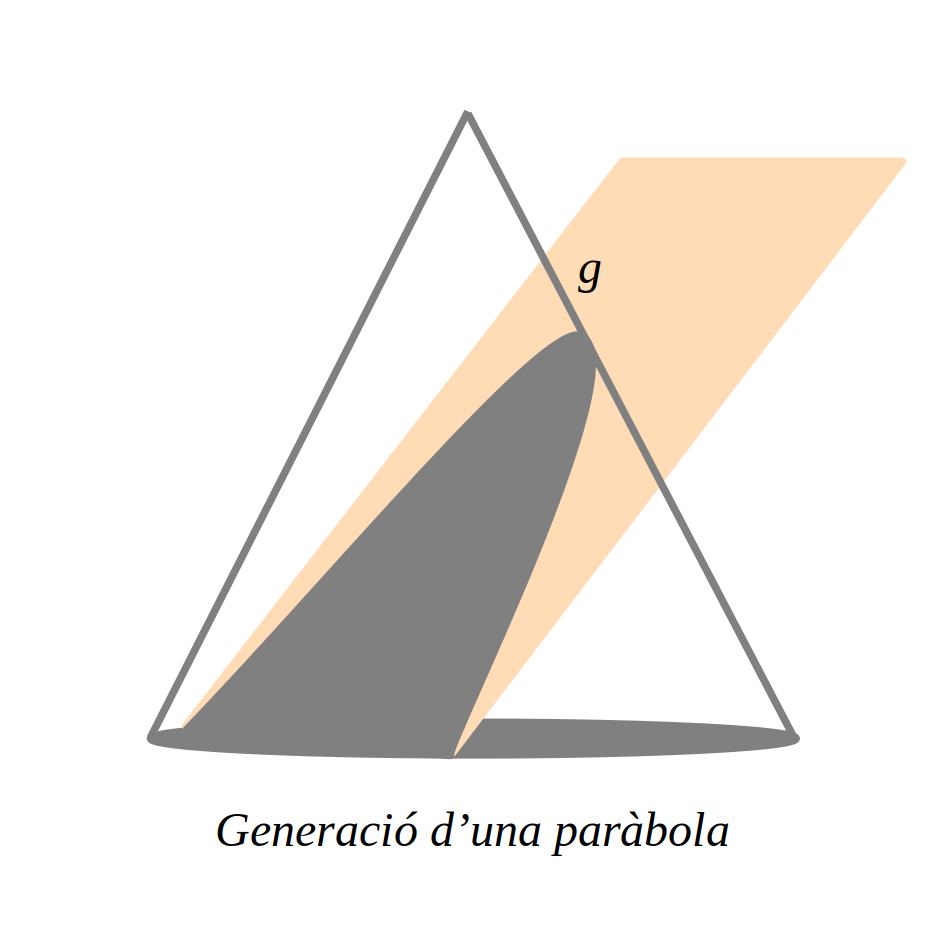
Una paràbola s’obté tallant de forma obliqua una superfície cònica.
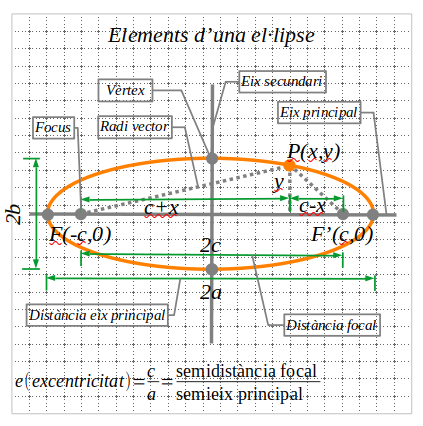
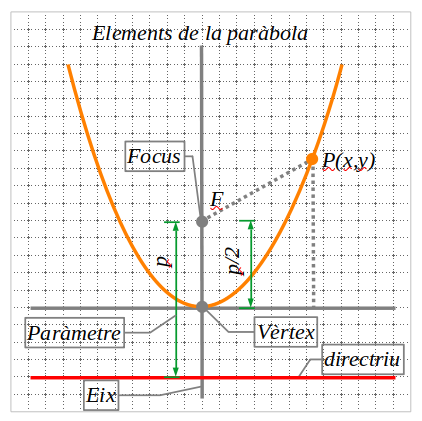
5.1 Elements de la paràbola
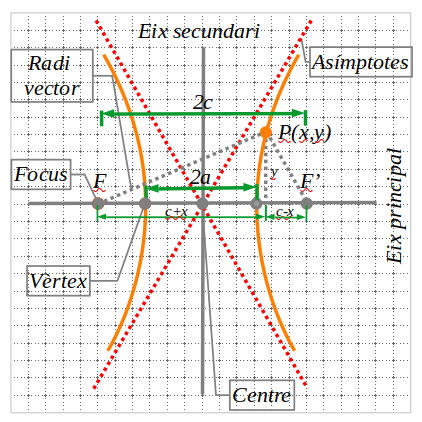
La distància del focus a la directriu s’anomena paràmetre.
L’eix és la recta que passa pel focus i és perpendicular a la directriu.
El vèrtex és el punt d’intersecció de la paràbola amb l’eix.
5.2 Equació general
\[
Ax²+Bx+Cy+D=0\\
Ay²+Bx+Cy+D=0
\]
Separarem els termes amb \[x\] dels termes amb \[y\] i dividirem tota l’equació pel coeficient del terme quadrat.
Farem el quadrat perfecte del terme quadrat i susbstituirem l’expressió calculada a l’equació anterior.
Calcularem l’equació de la paràbola transformant l’expressió del punt anterior en una la forma \[(y-y_0)²=\pm 2p(x-x_0)\], o bé de la forma \[(x-x_0)²=\pm 2p(y-y_0)\] extraent el factor comú del coeficient \[ x\] o \[y\] de primer grau de la dreta de la igualtat.
Si l’equació té un terme \[y²\], la transformarem en una de la primera forma. Si té un terme \[x²\], la transformarem en una equació de la segona forma.
Definirem els elements de la paràbola i en calcularem un parell de punts per a poder dibuixar-la.
La geometria (del grec, “mesura de la Terra) és la parts de les matemàtiques que estudia les relacions entre els elements que la formen (punt, recta, pla, angles i figures) i la manera de calcular-les.
Els elements de la geometria analítica a l’espai són el punt, la recta i el pla i els angles.
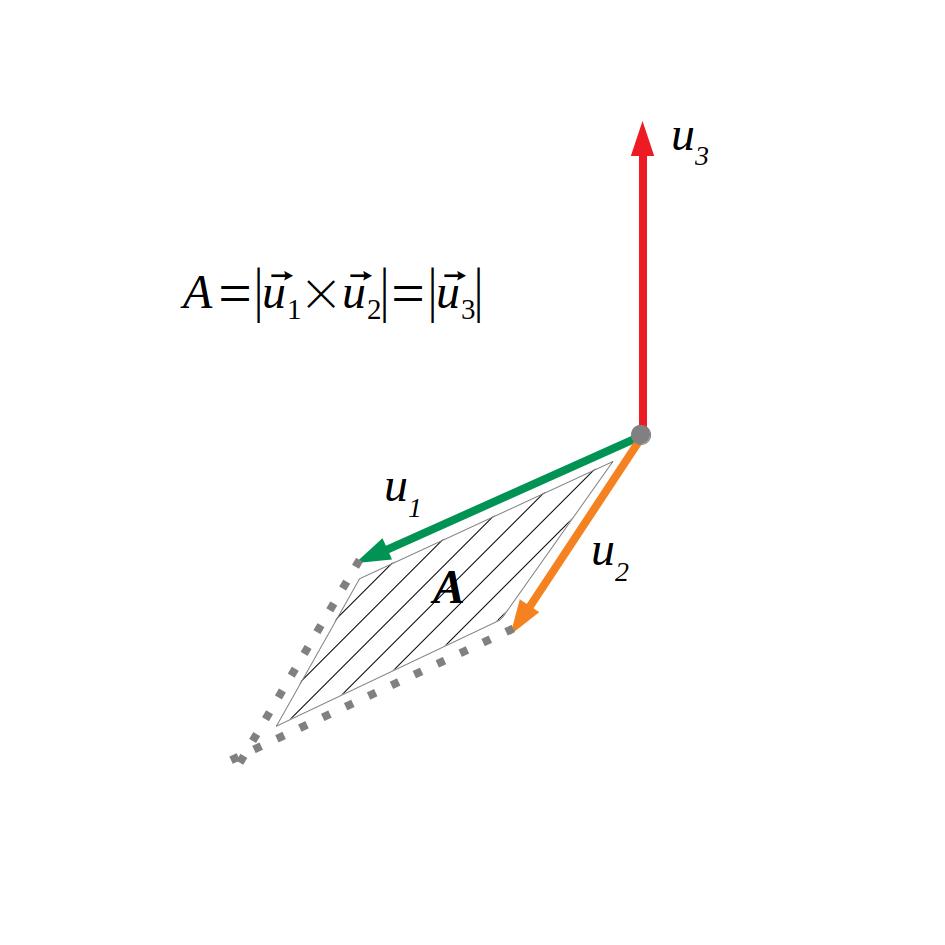
El producte vectorial de dos vectors és un altre vector perpendicular al pla que formen aquests dos vectors. El sentit del vector del producte vectorial es pot determinar amb la regla de la mà dreta.
El mòdul del vector resultant del producte vectorial de dos vectors representa l’àrea tancada per aquests vectors.
El producte vectorial no és commutatiu.
Per a calcular el producte vectorial de dos vectors farem el següent determinant:
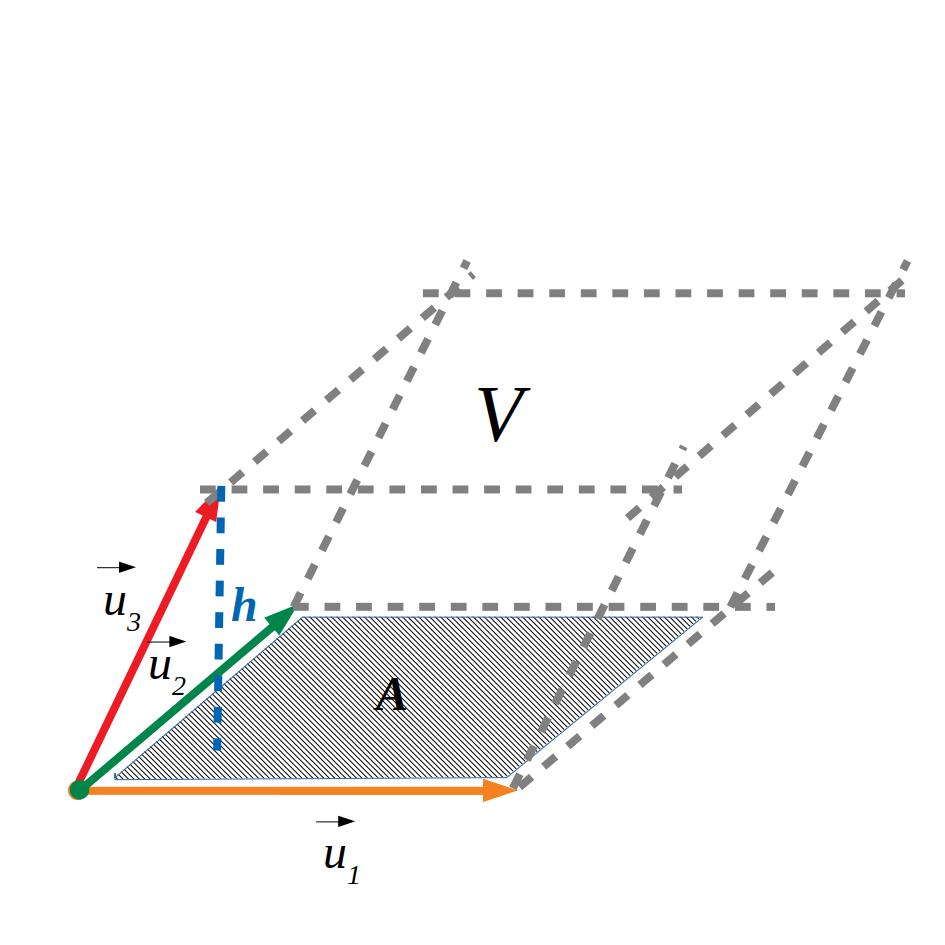
El producte mixt de tres vectors \[[u,v,w]\] s’obté multiplicant escalarment el primer vector pel producte vectorial del segon i el tercer. També es pot calcular fent el determinat dels tres vectors. Representa el volum tancat per aquests tres vectors.
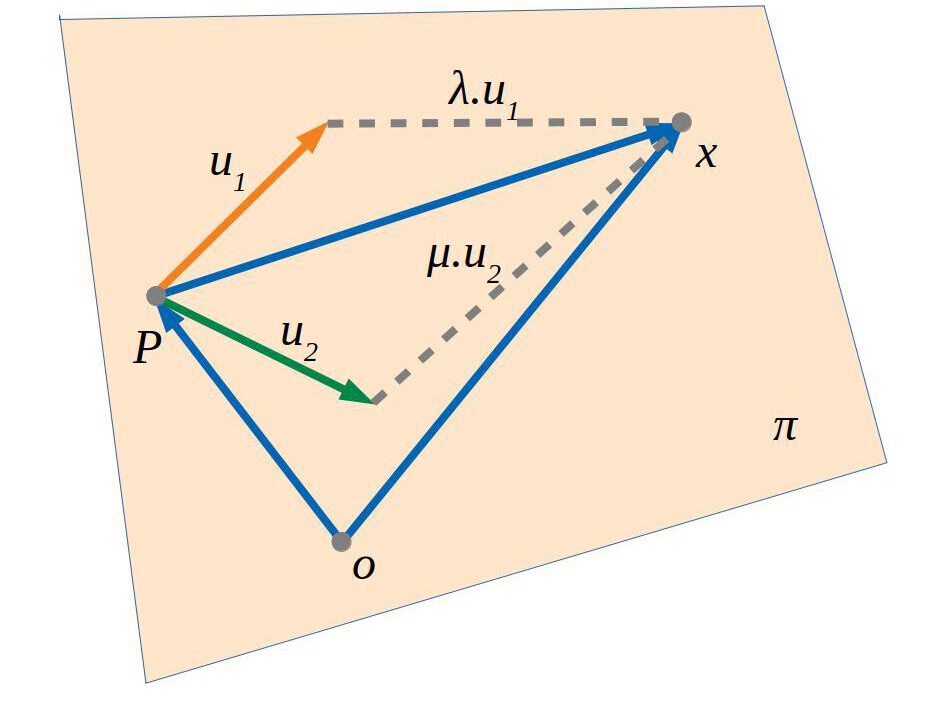
Per a definir tots els punts d’un pla ens calen tres punts o dos vectors i un punt.
Si \[O\] és l’origen de coordenades del sistema de referència, \[\vec u_1, \vec u_2\] són els dos vectors del pla de referència, \[P\] és un punt del pla de referència i \[X\] és el punt que volem definir, l’equació vectorial del pla amb dos vectors i un punt és: \[\vec {OX}=\vec{OP}+\vec{PX}\].
Podem estudiar la posició relativa de rectes i plans comparant-ne, o bé els punts i vectors, o bé comparant els rangs de les matrius formades amb les equacions generals de les rectes.
Si tenim l’equació general d’una recta però ens cal un vector i un punt, haurem de calcular-ne les equacions vectorial, paramètrica o continua.
Per a calcular l’equació paramètrica d’una recta si en tenim la general, farem:
Assignarem a alguna de les variables, per exemple la zeta, el paràmetre \[\lambda\]. Aquesta variable (o el paràmetre \[\lambda\]) serà la variable independent del sistema d’equacions indeterminat.
Resoldrem el sistema d’equacions indeterminat eliminant la \[y\] per a obtenir \[x\] en funció de \[z\]. També podem resoldre els passos 2 i 3 resolent el sistema d’equacions per Gauss o Crammer.
Agruparem les equacions resultants i obtenim l’equació paramètrica de la recta. Fent les operacions habituals de l’apartat 3 podem obtenir qualsevol altre equació de la recta.
Per a calcular l’equació general d’una recta si en tenim la paramètrica o continua farem com en l’exemple anterior els passos habituals per obtenir les diferents equacions d’una recta:
Per a calcular sols el vector d’una recta si en tenim l’equació general farem el producte vectorial del vectors normals de les equacions generals dels plans:
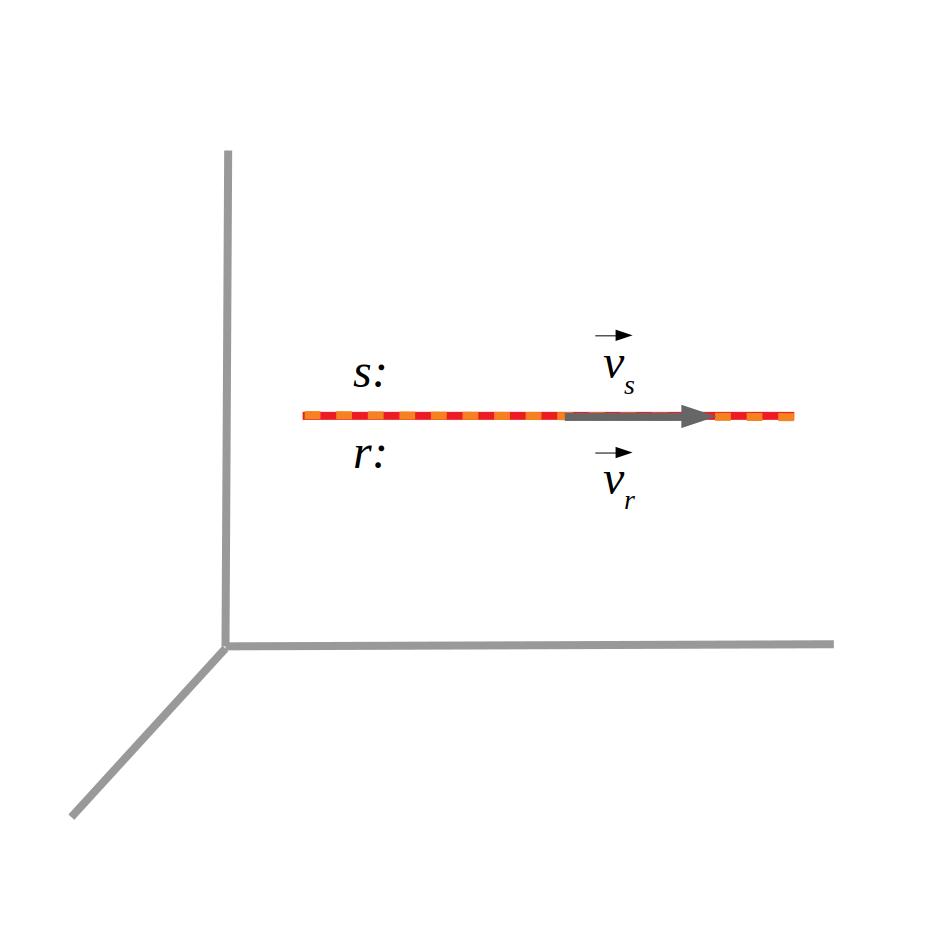
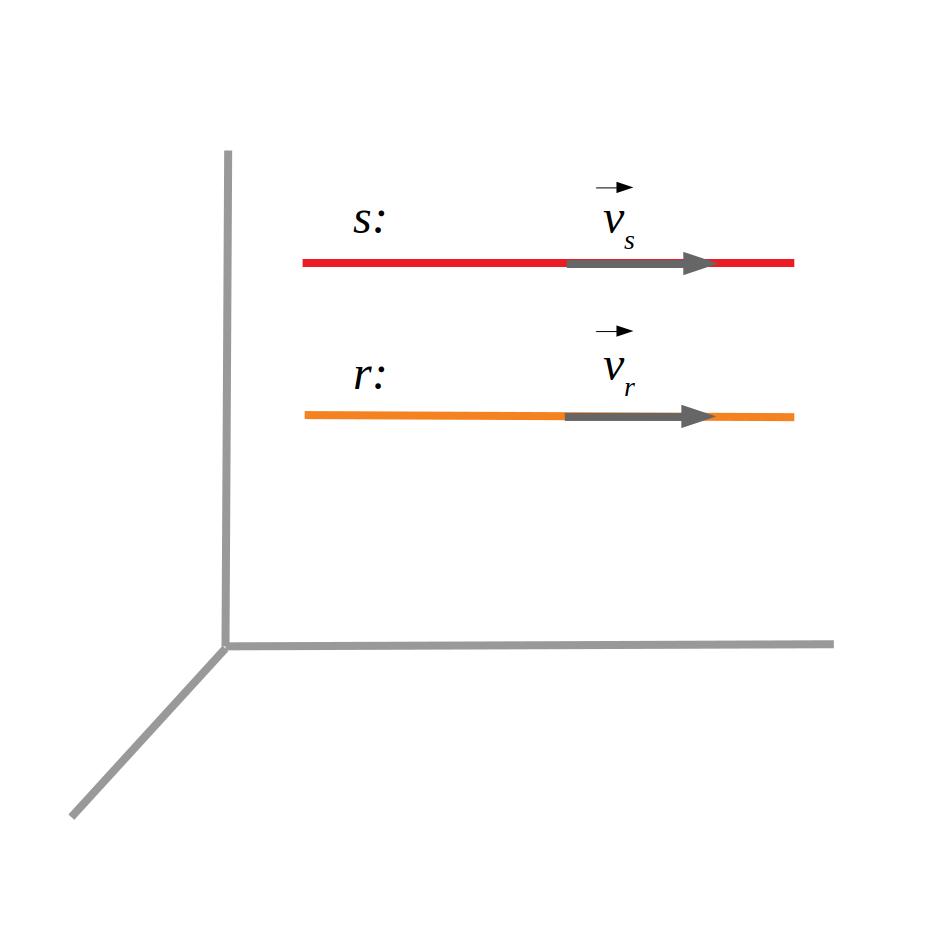
Si les rectes són coincidents, els vectors directors seran paral·lels i tindran els mateixos punts.
Si són paral·leles, els vectors directors seran paral·lels però tindran punts diferents.
Si les rectes són secants, els vectors directors no seran paral·lels i el determinant \[D\] dels dos vectors i el vector \[(x_2-x_1,y_2-y_1,z_2-z_1)\] serà zero.
Si les rectes s’encreuen, els vectors directors no seran paral·lels i el determinant \[D\] dels dos vectors i el vector \[(x_2-x_1,y_2-y_1,z_2-z_1)\] serà diferent de zero:
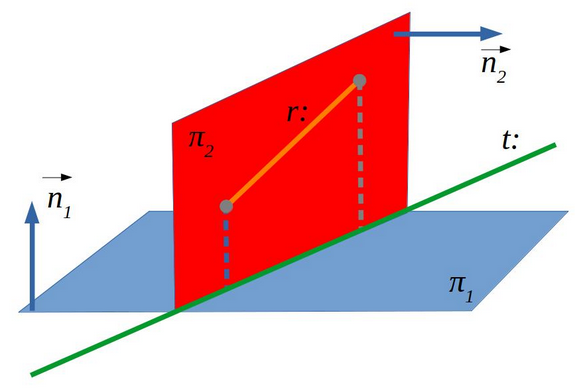
Per a calcular la projecció d’una recta sobre un pla, fem:
Calculem el vector normal del pla que conté la recta (\[\pi_2\]) fent el producte vectorial del vector de la recta i el vector normal del pla de projecció (tots dos són vectors del pla que conté la recta).
Calculem el terme independent \[D\] de \[\pi_2\] usant el punt de la recta que també és un punt d’aquest pla.
L’equació de la recta projectada és la formada per les equacions generals dels dos plans.
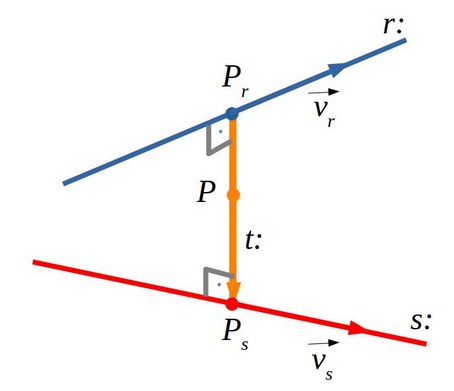
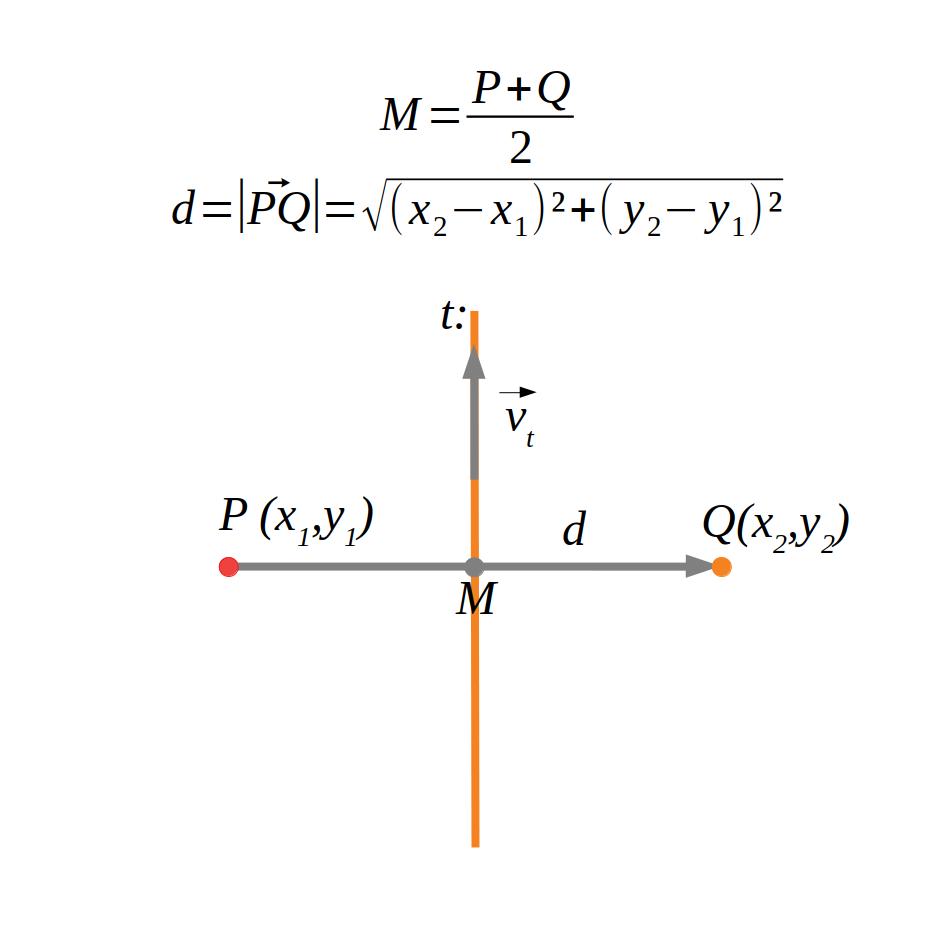
5.2.2 Recta perpendicular a dues rectes que s’encreuen
El procediment és:
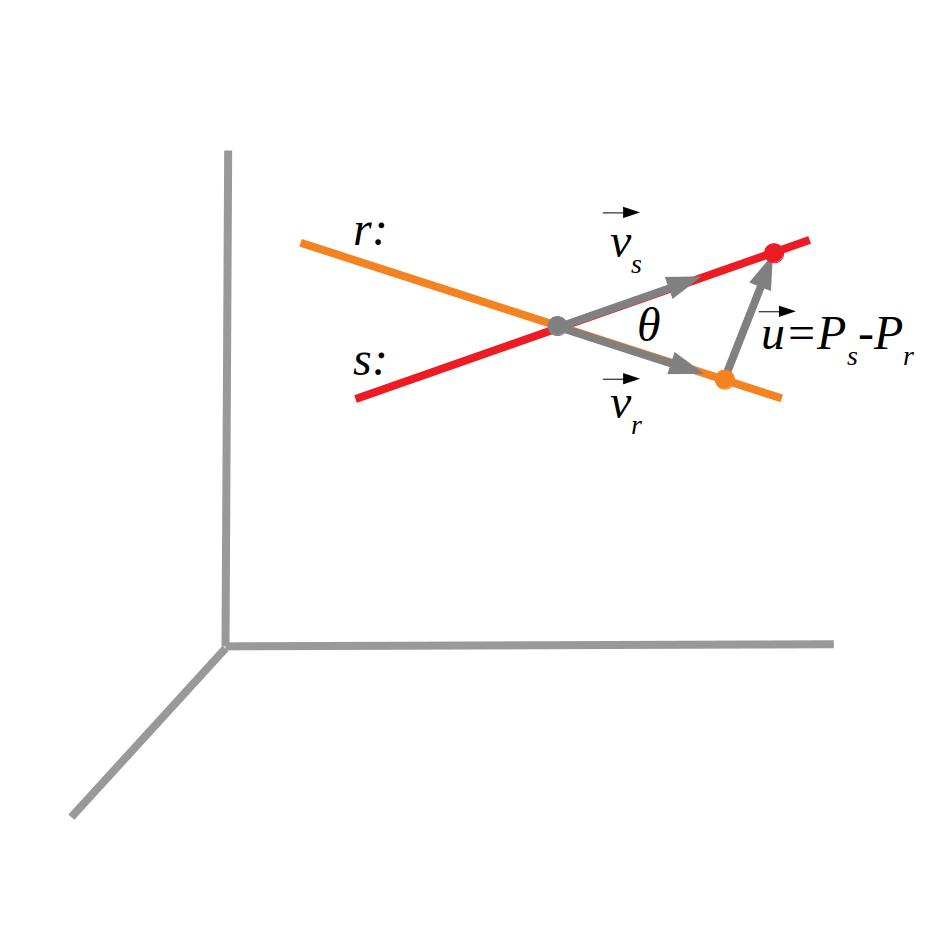
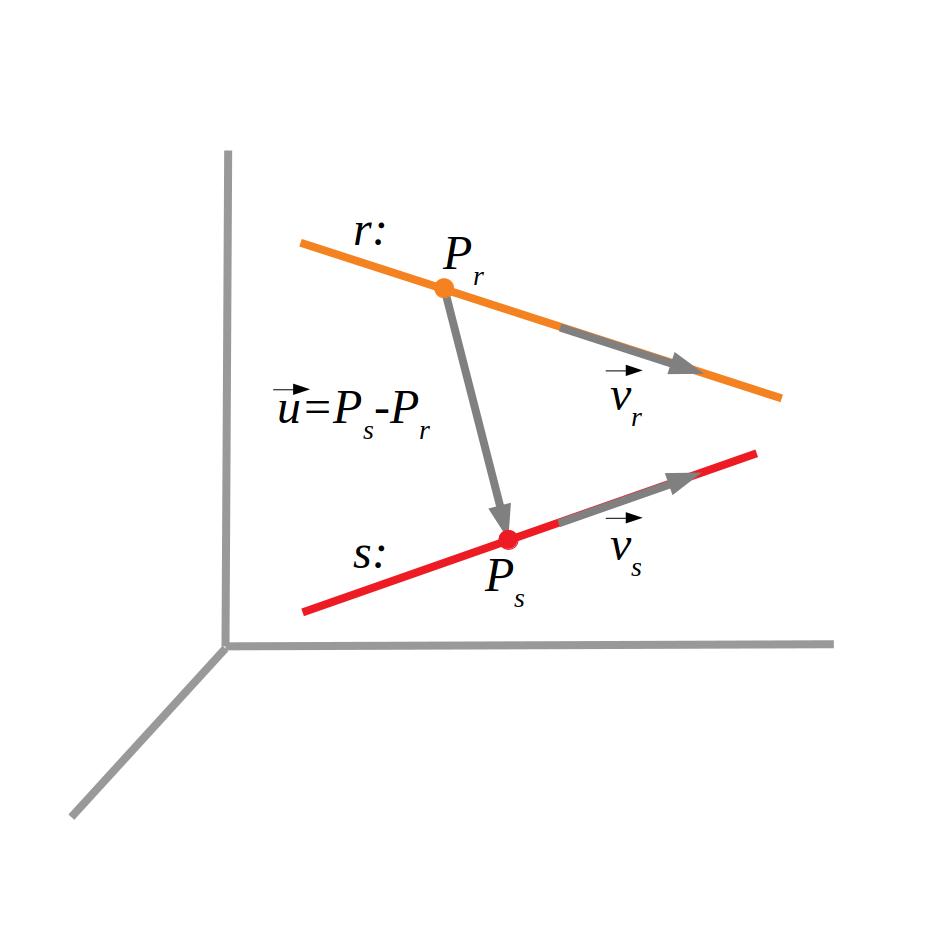
Expressem genèricament un punt de cada recta (\[P_r,P_s\]) i calculem el vector entre aquests dos punts (\[\vec {P_rP_s}\]).
Aquest vector ha de ser perpendicular a les rectes que s’encreuen, per tant el producte escalar amb els vectors de les rectes ha de ser zero.
Resolent el sistema d’equacions trobem el valor dels paràmetres de cada recta que fan que la recta \[t:\] sigui perpendicular i en calculem un vector perpendicular.
Fem passar la recta perpendicular \[t:\] per un dels punts del vector \[P_r,P_s\] i tenim l’equació de la recta perpendicular a dues rectes que s’encreuen.
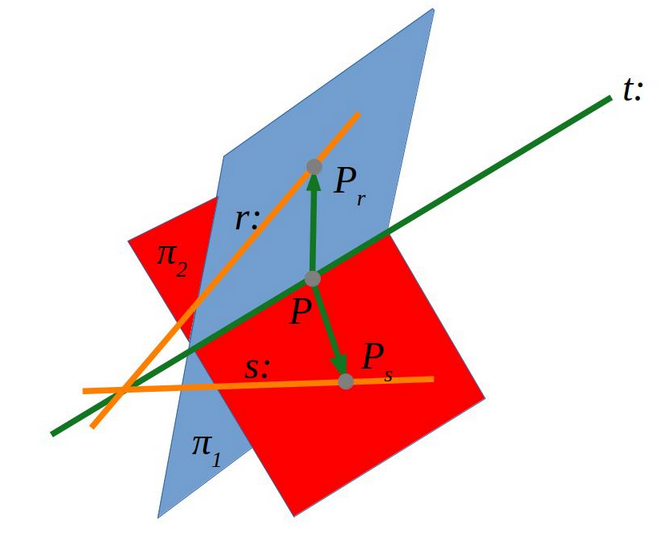
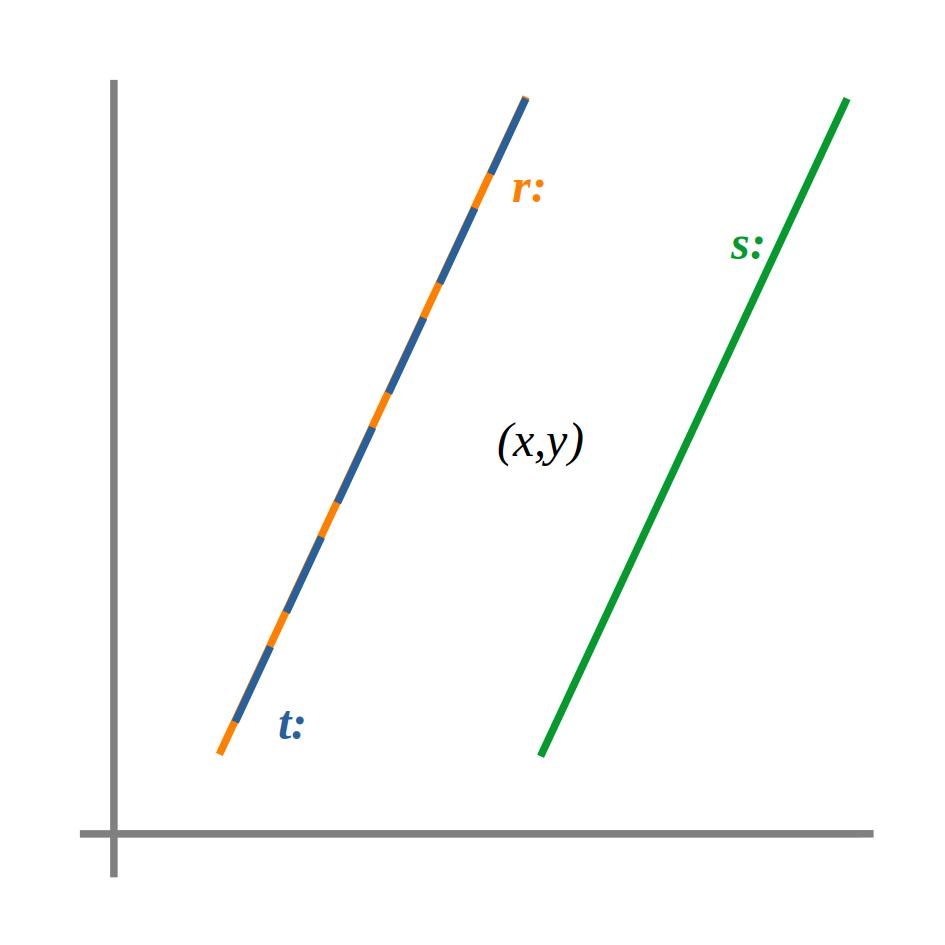
5.2.3 Recta que passa per un punt que talla a dues rectes
És la recta formada per cada un dels dos plans \[\pi_1,\pi_2\] que contenen a \[r,s\] respectivament i que passa per \[P\]. Per a calcular l’equació d’aquesta recta hem de trobar les equacions dels plans que contenen a \[r:, s:, \; i \; P\]:
Calculem el vector normal de \[\pi_1\] fent el producte vectorial del vector de la recta \[r:\] i el vector \[\vec {PP_r}\].
Calculem el vector normal de \[\pi_2\] fent el producte vectorial del vector de la recta \[s:\] i el vector \[\vec {PP_s}\].
Calculem els plans \[\pi_1,\pi_2\] amb les vectors normals i el punt \[P\].
L’equació de la recta és la formada per les equacions generals dels dos plans.
Per a determinar la posició relativa d’una recta i un pla comparant punts i vectors usarem les equacions vectorial, paramètrica o continua de la recta i l’equació general del pla. Per fer-ho amb rangs, ens calen les equacions generals de la recta i del pla.
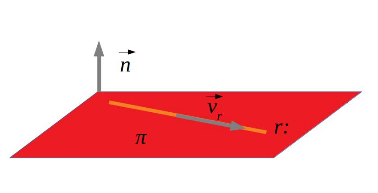
Si la recta està continguda en el pla, el producte escalar del vector de la recta i el normal del pla serà zero i els punts de la recta són punts del pla. Per a saber si un punt de la recta és també un punt del pla el substituirem a l’equació del pla:
Exemple:
\[
r:
\begin{cases}
x=2-5\lambda\\
y=3+3\lambda\\
z=1+\lambda
\end{cases}\\
v_r(-5,3,1), \; P_r(2,3,1)\\[1cm]
\pi:2x+4y-2z-14=0\\
\vec n(2,4,-2)\\[1cm]
\vec v_r \cdot \vec n=(-5,3,1) \cdot (2,4,-2)=-5 \cdot 2+3 \cdot 4-1 \cdot 2=-10+12-2=0\\
\pi(2,3,1)=2 \cdot 2+4 \cdot 3 -2 \cdot 1-14=4+12-2-14=0\\[1cm]
\text{El pla i la recta són paral·lels i la recta està continguda en el pla.}
\]
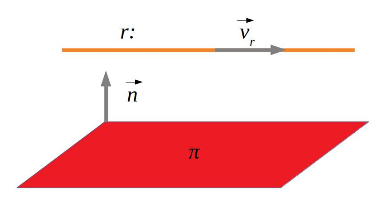
Si la recta i el pla són paral·lels, el producte escalar dels dos vectors serà zero, però els punts de la recta i del pla són diferents:
\[
r:
\begin{cases}
x=2-5\lambda\\
y=4+3\lambda\\
z=3+\lambda
\end{cases}
\Rightarrow r:
\begin{cases}
3x+5y-26=0\\
x+5z-17=0
\end{cases}\\
\pi:4x+6y+2z-28=0\\[1cm]
\vec v_r(-5,3,1), \; P_r(2,4,3)\\
\vec n_\pi(4,6,2)\\[1cm]
\vec v_r \cdot \vec n_\pi=(-5,3,1) \cdot (4,6,2)=-20+18+2=0 \text{ (Recta i pla són paral·lels)}\\
\pi(2,4,3):4 \cdot 2+6 \cdot 4+2 \cdot 3-28=10 \text{ (Els punts de la recta no śon del pla)}\\[1cm]
\text{Per tant, la recta i el pla són paral·lels}\\[1cm]
\text{Matriu A}=\begin{bmatrix}3 & 5 & 0 \\ 1 & 0 & 5 \\ 4 & 6 & 2 \end{bmatrix}\\
\text{Matriu A*}=\begin{bmatrix}3 & 5 & 0 & 26 \\ 1 & 0 & 5 & 17 \\ 4 & 6 & 2 & 28\end{bmatrix}\\
\text{Rang A}=2 \\
\text{Rang A*}=3 \\
\text{Per tant, la recta i el pla són paral·lels}
\]
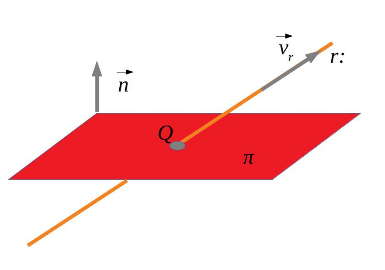
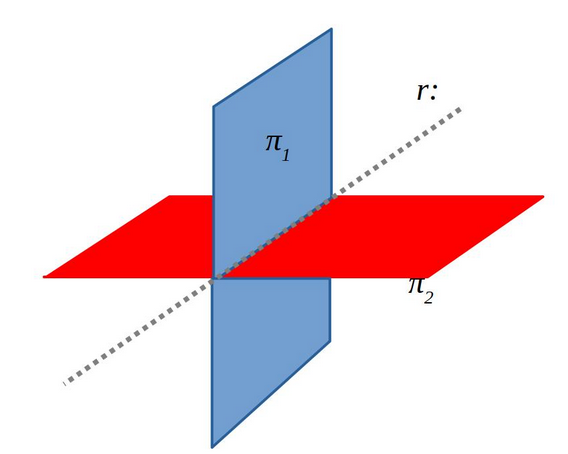
Si el pla i la recta són secants , la recta tallarà el pla en un punt (Q). Q serà el punt que resulta de fer el sistema d’equacions generals de la recta i el pla.
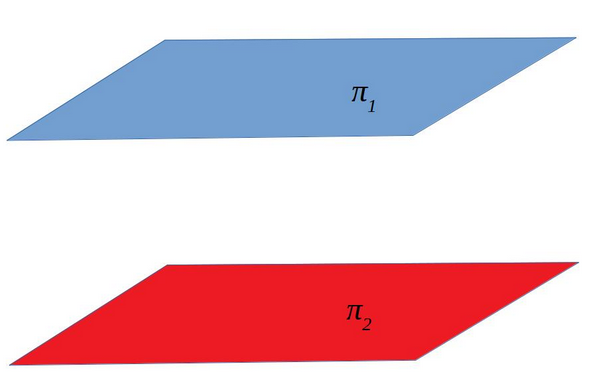
Per a determinar la posició relativa de dos plans determinarem els rangs de les equacions generals del plans, o bé compararem els vectors i els punts de cada pla:
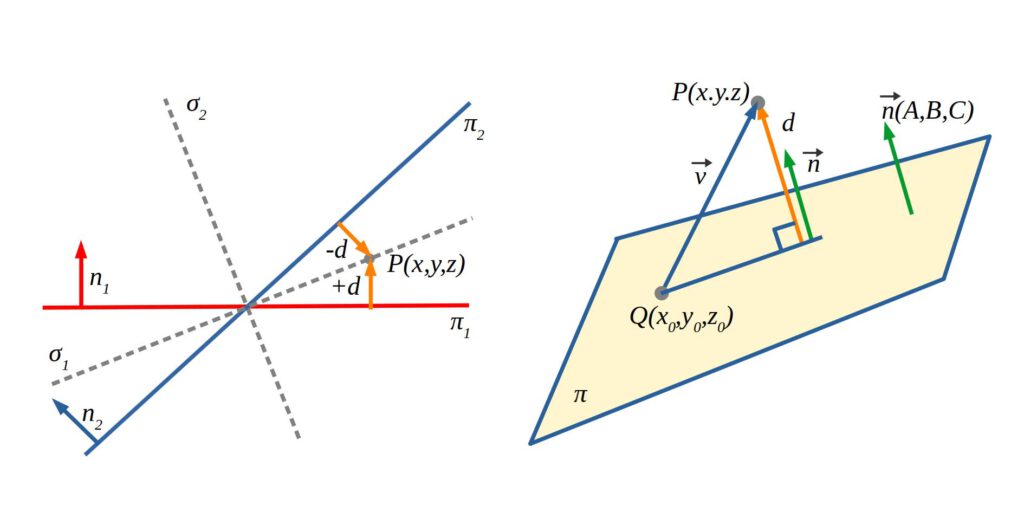
Un pla bisector és un pla que passa per l’aresta d’un angle dièdric i el divideix en dos angles iguals. Un angle dièdric és una regió de l’espai compresa entre dos semiplans que tenen la mateixa recta, anomenada aresta de l’angle dièdric.
Per a calcular els dos plans bisectors que formen l’angle dièdric, farem:
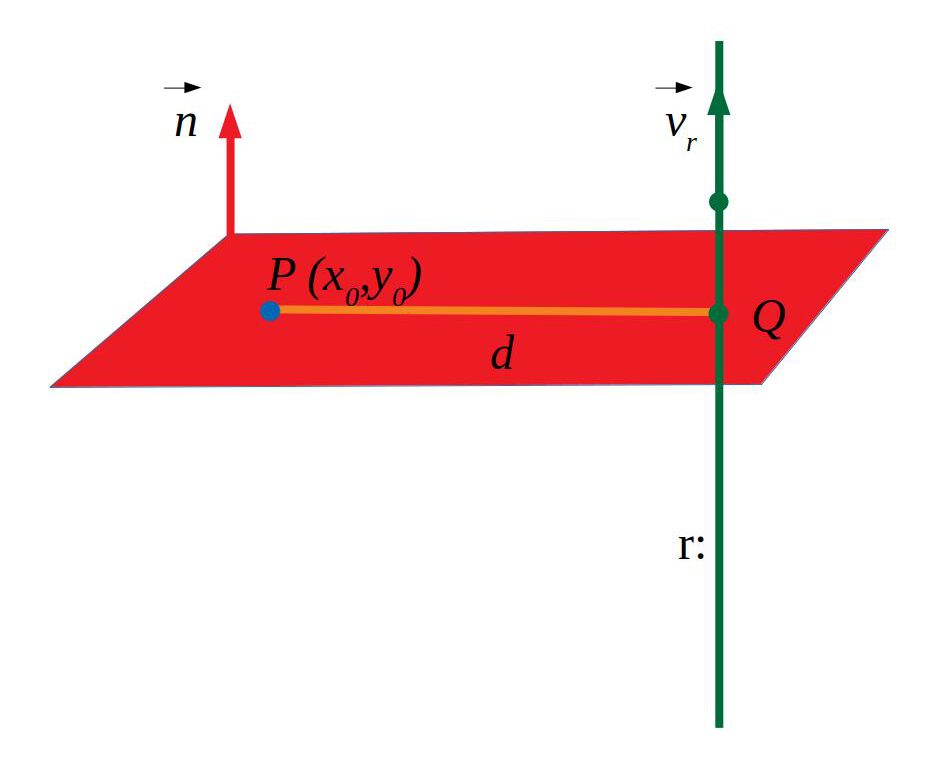
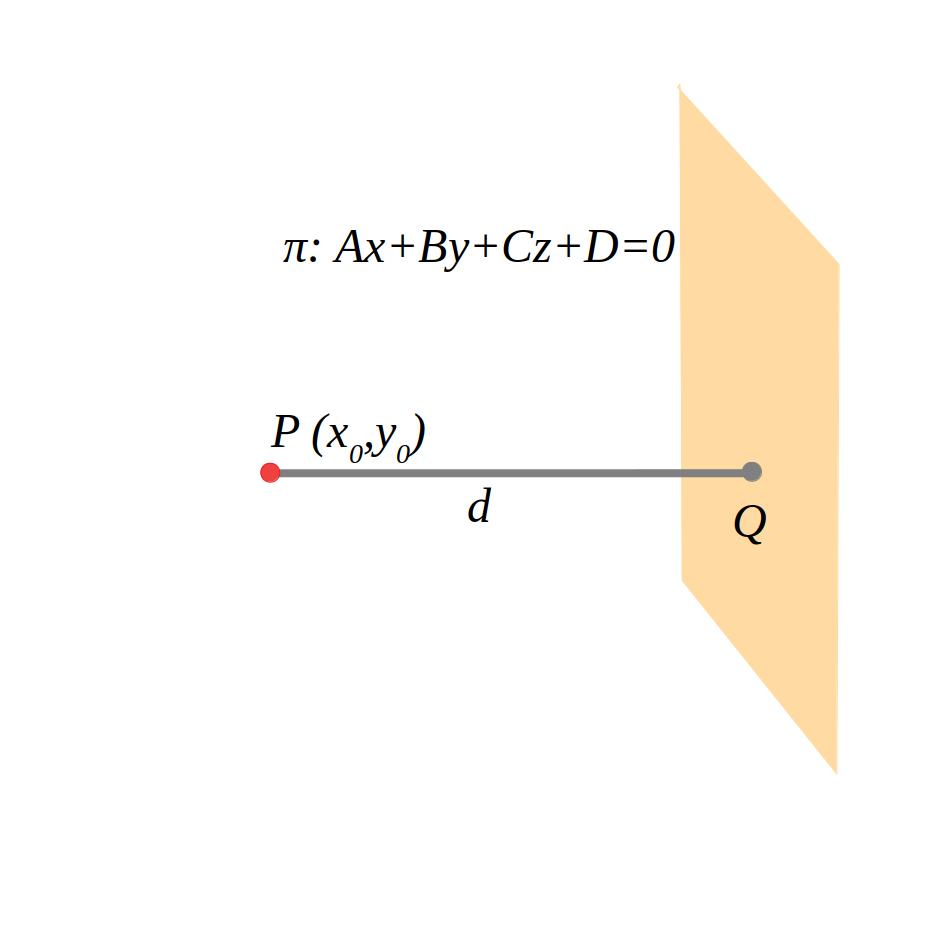
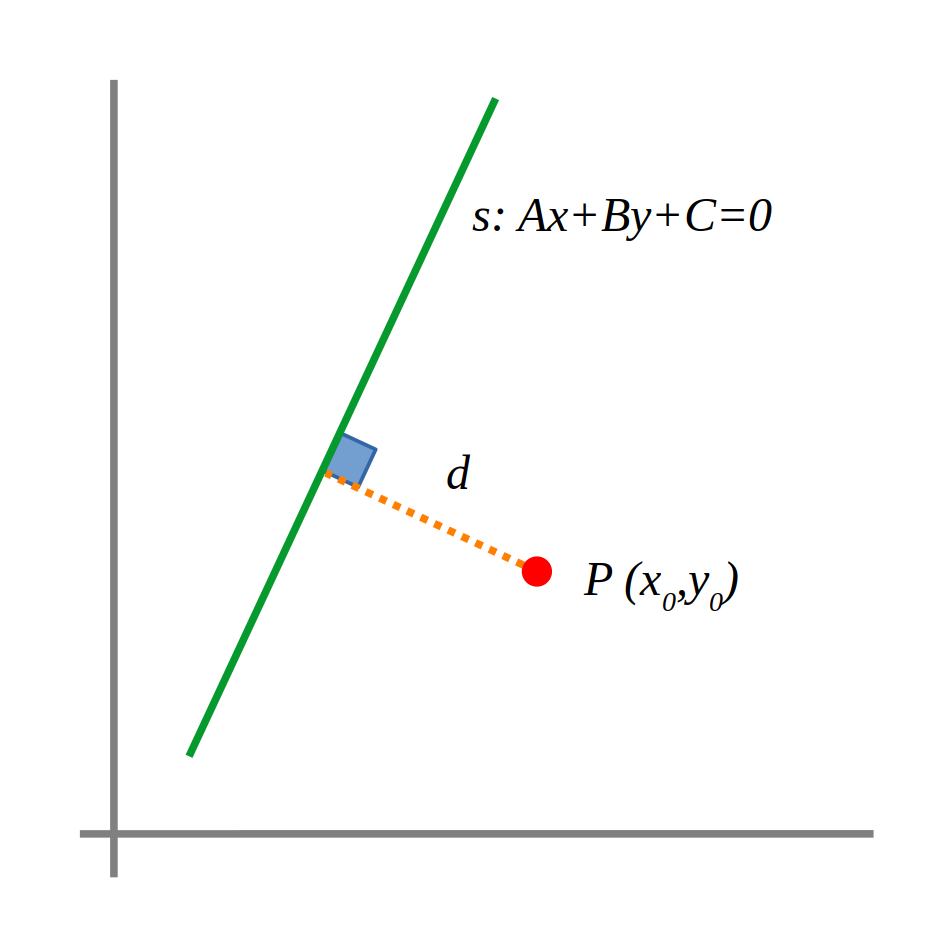
La distància \[d\] mínima o perpendicular d’un punt \[P\] a un pla (o a una recta) és el mòdul del vector projecció entre un punt del pla (origen) i el punt P (extrem).
El signe del vector distància és positiu si el sentit d’aquest vector és el mateix que el del vector normal del pla, i és negatiu si els sentits d’ambdós vectors són contraris.
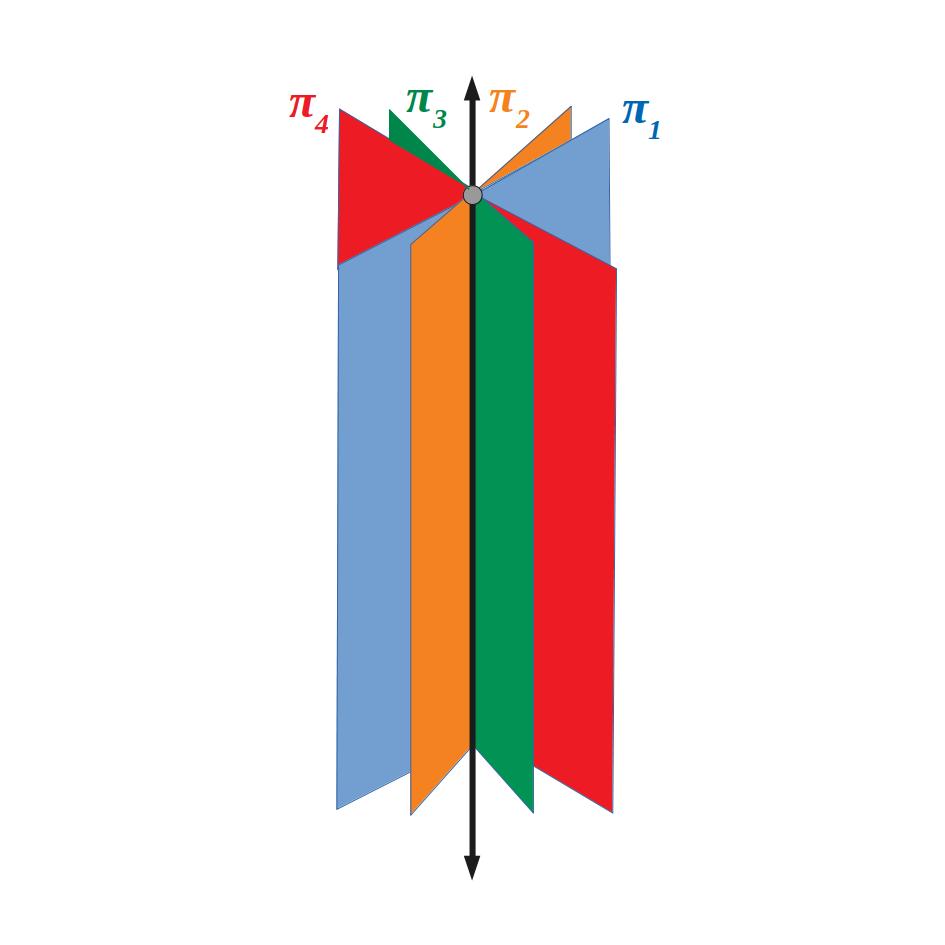
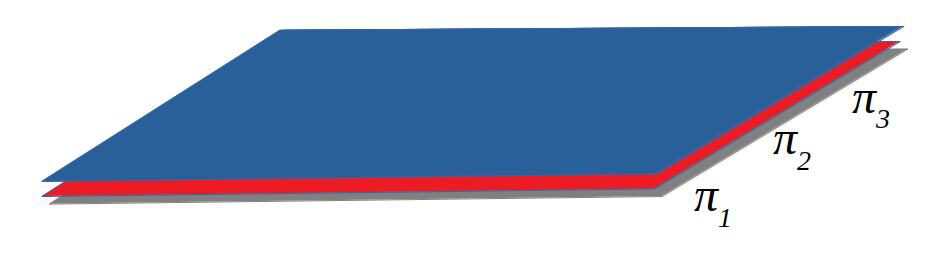
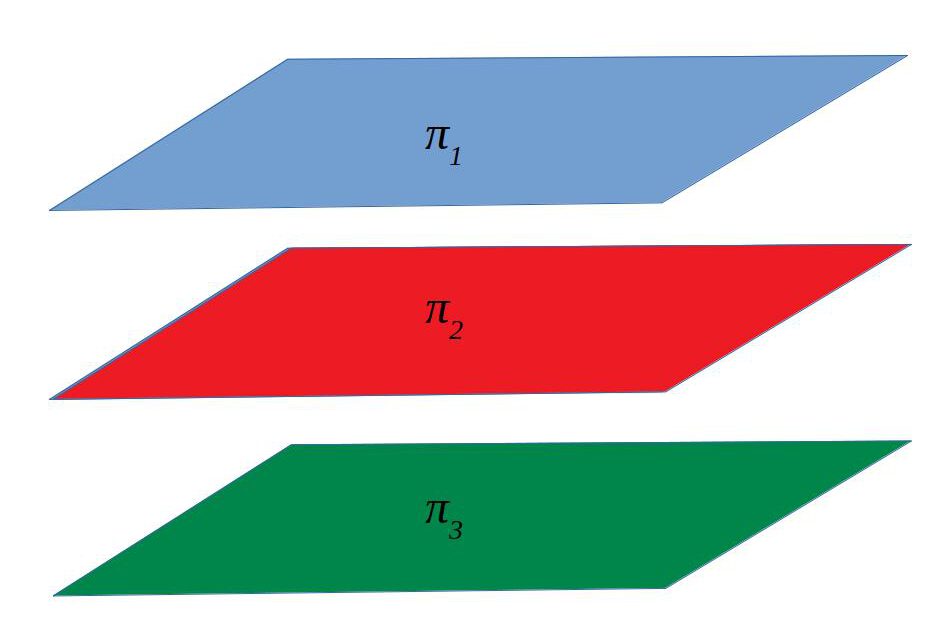
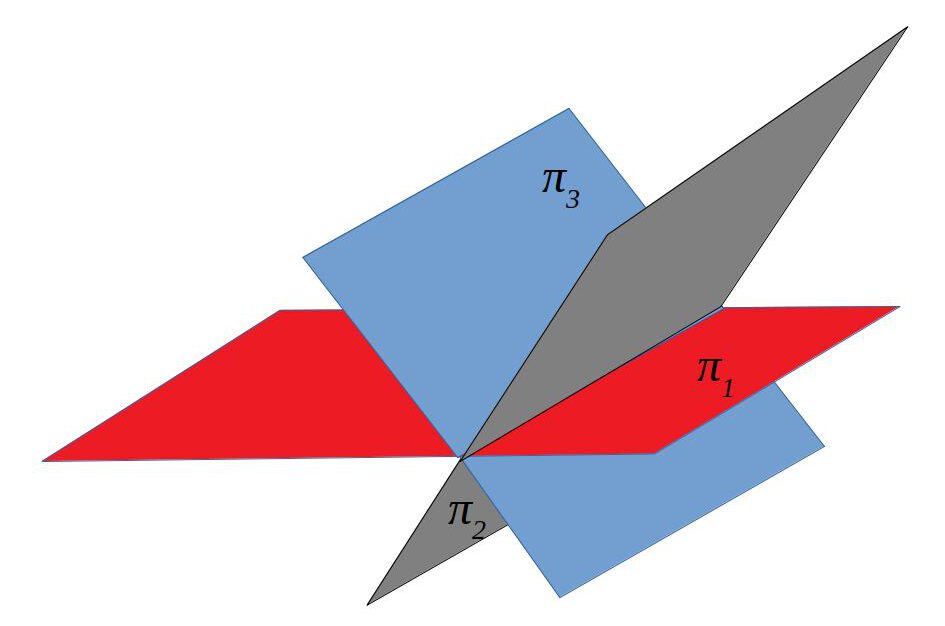
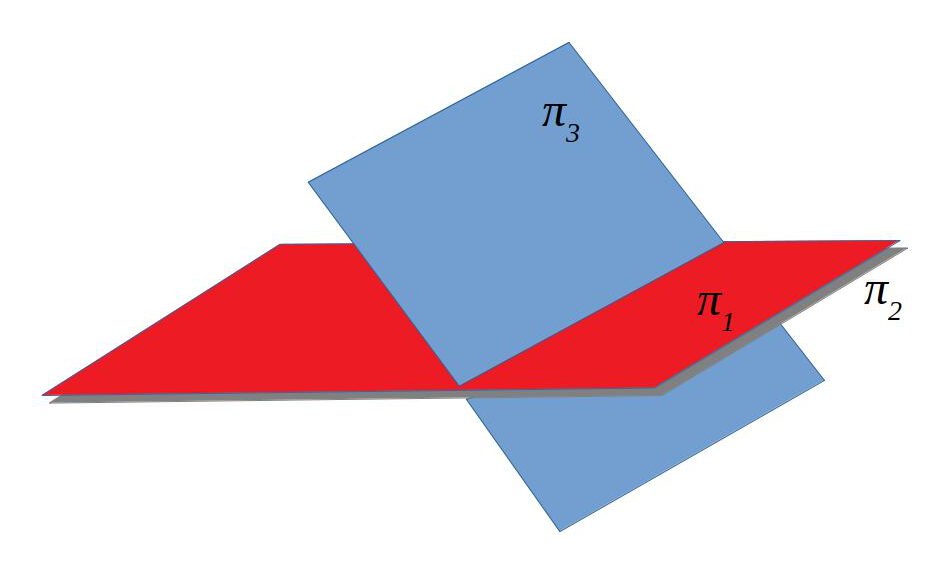
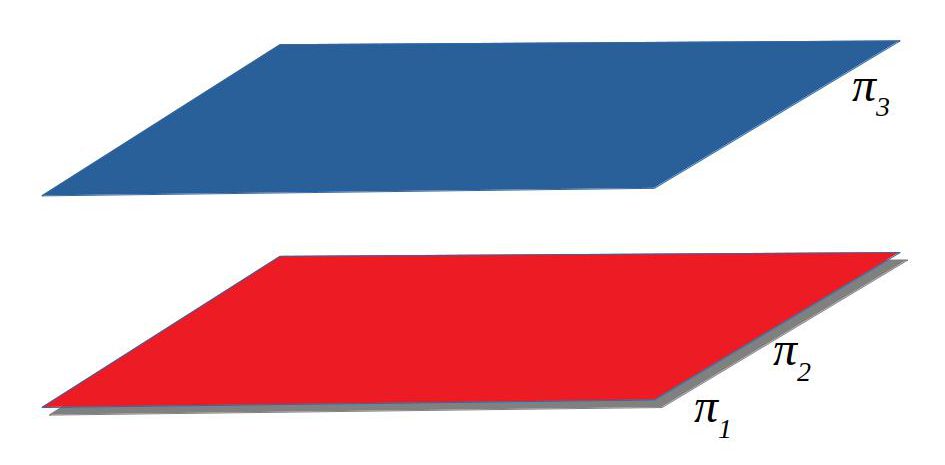
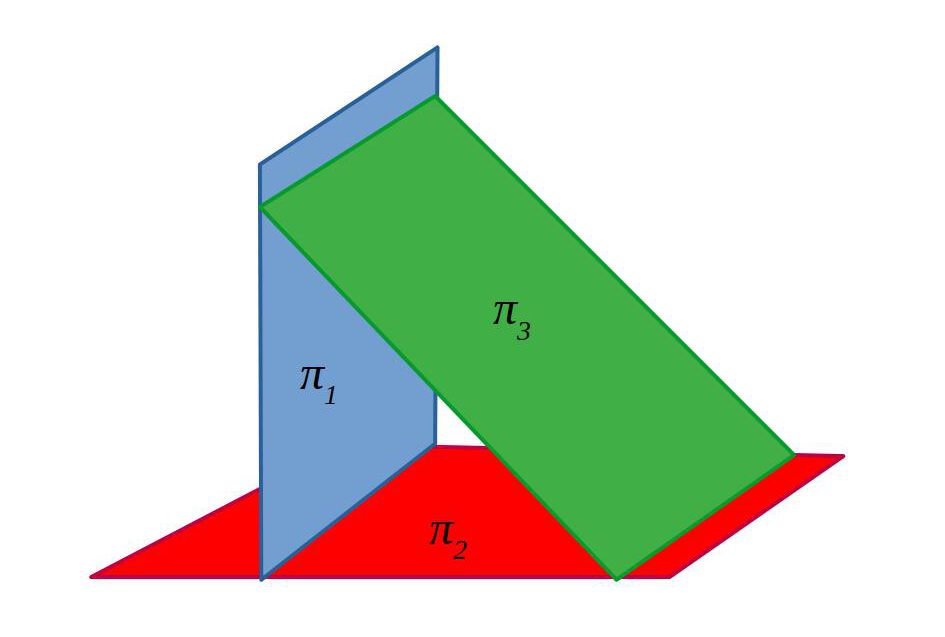
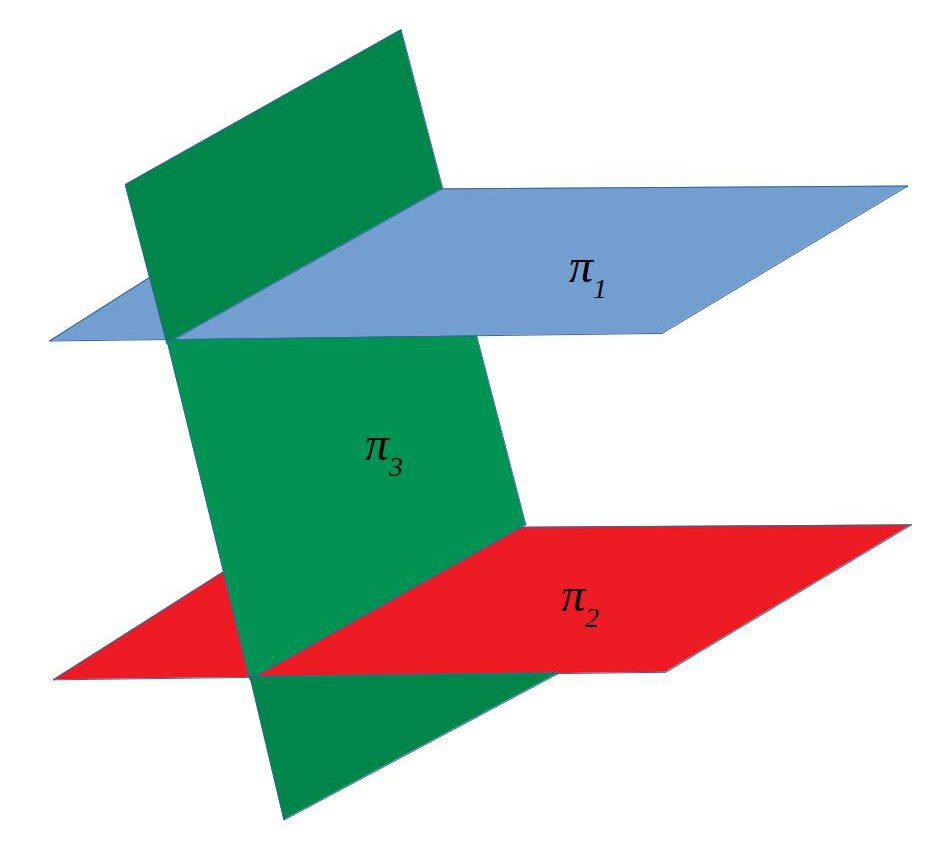
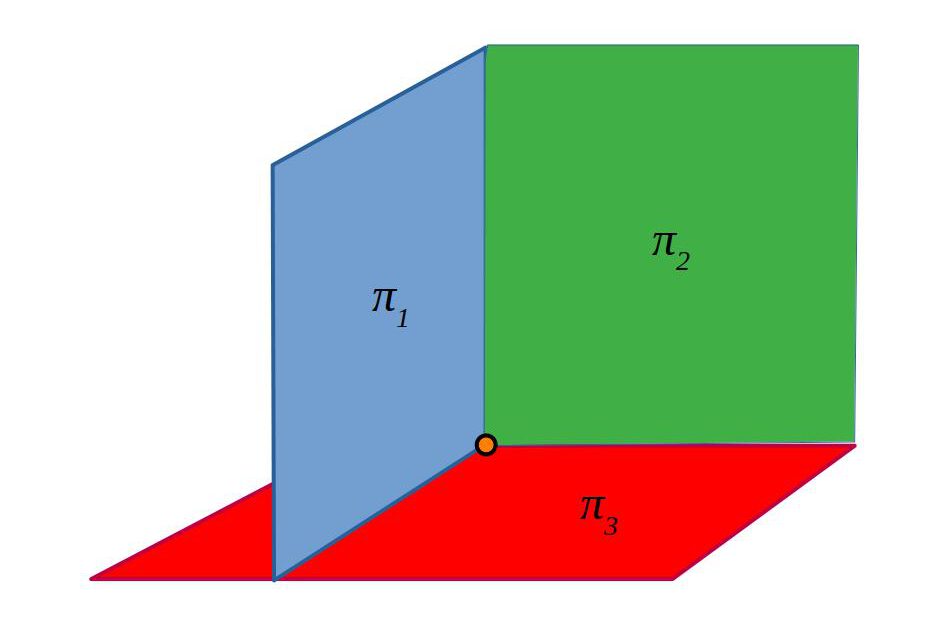
5.5 Tres plans
Per a determinar la posició relativa de tres plans hem d’usar les equacions generals dels plans i calcular el rang de la matriu de coeficients i de l’ampliada. En alguns casos, també hem de tenir en compte els vectors directors dels plans per tal de no confondre dues posicions relatives amb el mateix resultat quan comparem els rangs:
Tres plan coincidentsParal·lels dos a dosSecants i diferentsDos de coincidents i un de secantParal·lels i dos de coincidentsSecants dos a dosDos de paral·lels i un de secantSecants en un punt
6. Distàncies i angles
6.1 Distàncies
6.1.1 Punt-recta
La distància mínima és la distància perpendicular entre el punt i la recta.
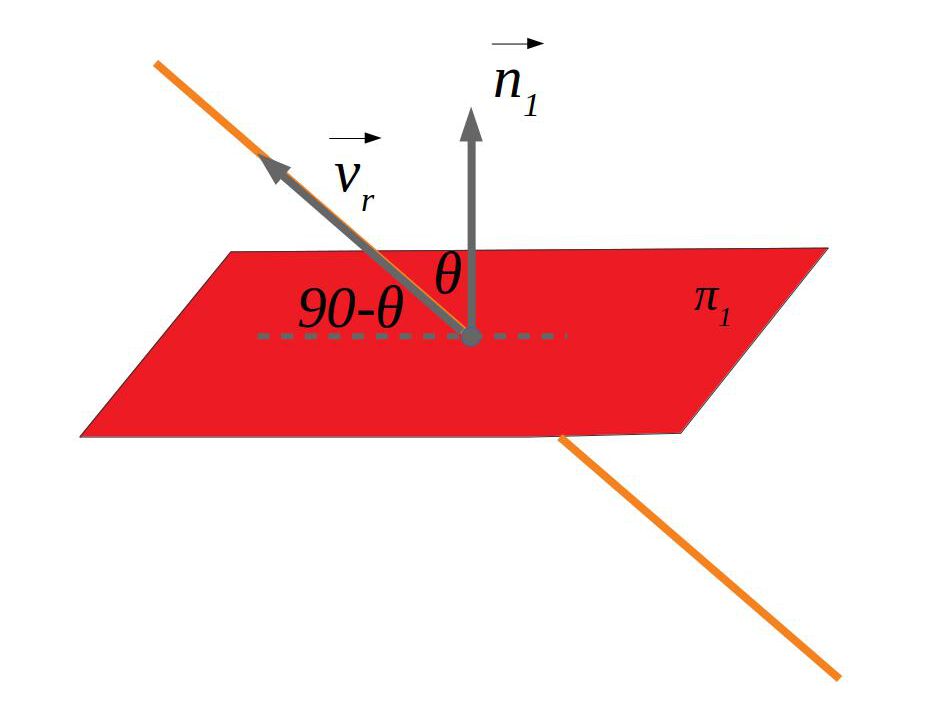
L’angle entre la recta i el pla és \[90-\theta\]. Aquest angle també es pot calcular directament fent \[\sin \theta=\frac {\vec u \cdot \vec v}{|\vec u| \cdot |\vec v|}\].
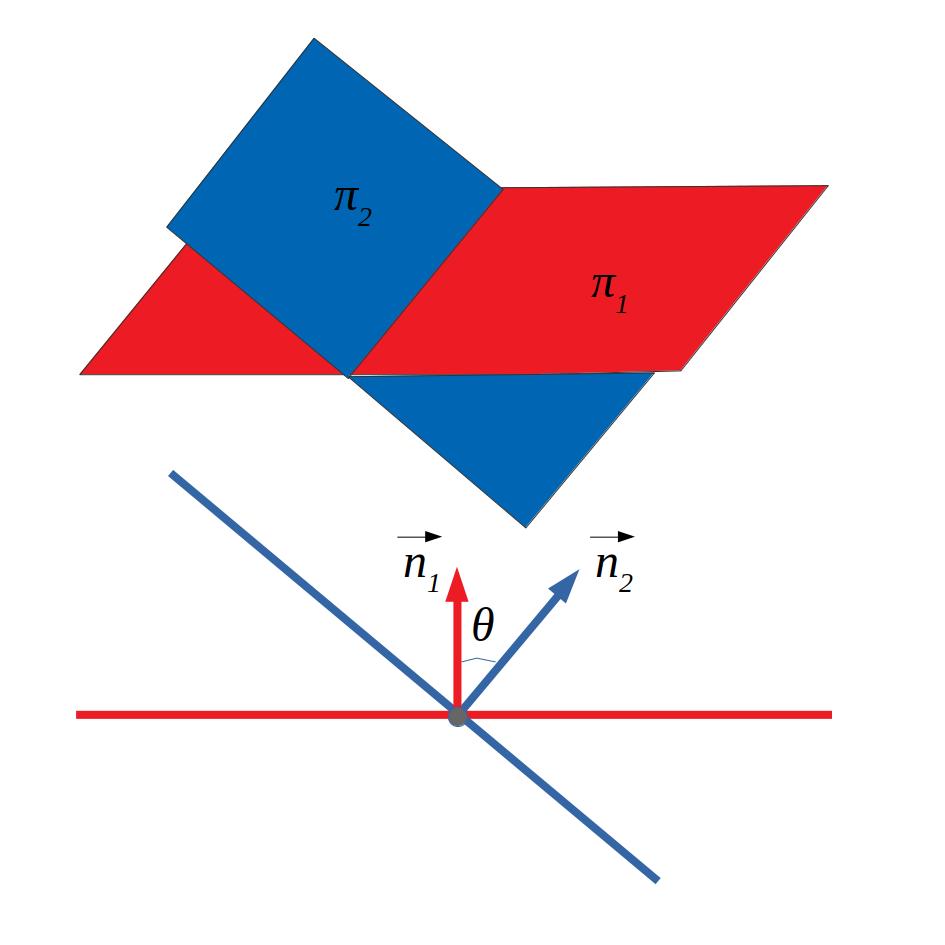
6.2.3 Pla-pla
Es calcula de la mateixa manera que l’angle entre dues rectes l’angle_entre dues rectes fent servir els vectors normals dels plans.
Tens dubtes? Vols saber-ne més? T’agradaria que publiquéssim algun tema del teu interès? Has trobat algun error?
Envia’ns un comentari sense compromís i et respondrem tan aviat com ens sigui possible.
Una recta és un conjunt de punt infinits en línia. Podem definir una recta amb dos punts o amb un punt i un pendent.
punt-punt
punt -pendent
1.2 Equacions de la recta
L’equació d’una recta es pot expressar de diferents maneres. Farem sevir l’equació que més ens convingui per tal de fer els càlculs més fàcilment o segons les dades disponibles.
1.3 Equació vectorial
L’equació vectorial de la recta es dedueix de la definició d’una recta amb dos punts: si a un punt d’origen de la recta que volem definir li sumem un nombre determinat de vegades (\[t\]) un dels vectors directors de la recta podem trobar-ne qualsevol altre punt.
\[(x,y)=(x_0,y_0) + t \cdot (u,v)\]
1.4 Equació paramètrica
Igualant els components \[x\] i \[y\] de l’equació vectorial:
\[
x=x_0+t \cdot u\\
y=y_0+ t \cdot v
\]
1.5 Equació contínua
Aïllant el paràmetre \[t\] de cadascuna de les equacions paramètriques anteriors:
\[
t=\frac{x-x_0}{u}=\frac{y-y_0}{v}
\]
1.6 Equació general o implícita
Surt de fer el producte d’extrems i de mitjos de l’equació contínua:
El vector \[\vec{n}=(A,B)\] és un dels dos vectors perpendiculars de la recta. Per a calcular el vector perpendicular d’una recta tan sols hem de permutar els components del vector i canviar-ne un de signe.
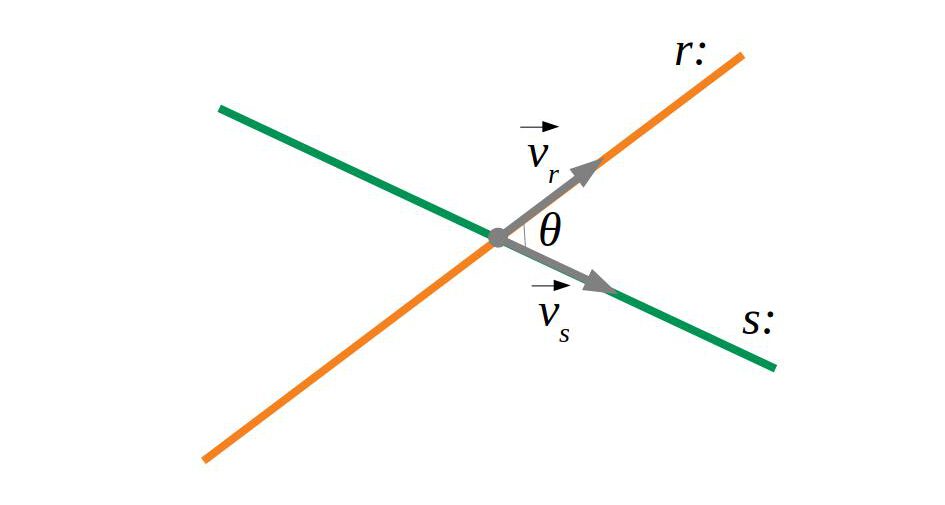
Els vectors perpendiculars de dues rectes formen el mateix angle que els vectors directors.
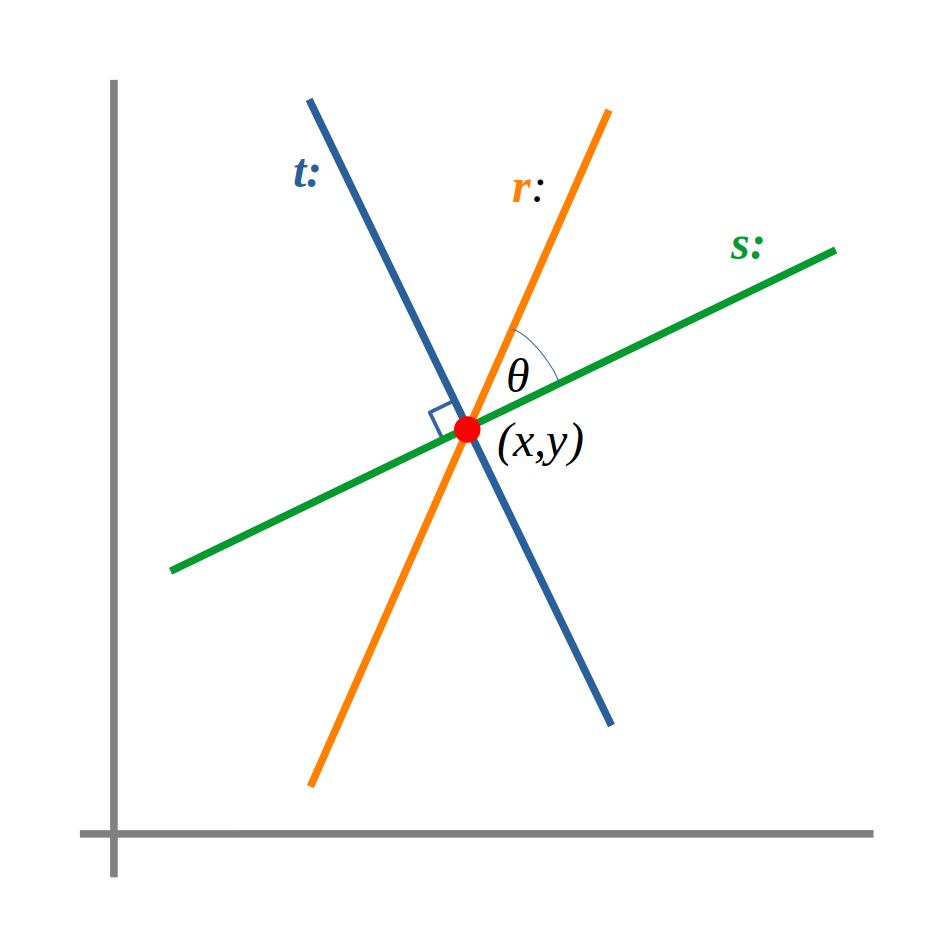
O bé dues rectes són paral·leles, o bé són secants. Per a determinar si dues rectes son paral·leles o coincidents (paral·lelisme) o secants (amb un angle qualsevol o perpendiculars) resoldrem el sistema d’equacions lineals.
rectes perpendiculars (t:, s:) o secants amb un angle diferent de 90º (r:,s:).Rectes parale·les (r:, s:) o coincidents (r:, t:)
Una integral indefinida són totes les funcions primitives \[F(x)\] d’una funció \[f(x):\] \[\int f(x) \enspace dx=F(x)+C\]. Les diferents funcions es diferencien una de l ‘altra tan sols per un paràmetre \[C\].
A la integral d’una funció derivada (primitiva) li hem d’afegir una constant \[C\] perquè la derivada d’una constant és zero, i quan derivem la primitiva aquesta constant es perd. Aquest paràmetre és el deplaçament vertical de la funció.
3. Integrals immediates
Són les integrals que s’obtenen de les regles de derivació invertides:
Les integrals obtingudes d’aquesta manera formen la taula d’integrals.
3.1 Taula d’integrals immediates
f (x)
f(u)
F(x)
F(u)
\[\int dx\enspace\]
\[\int du\]
\[x+C\]
\[u+C\]
\[\int k \enspace dx\]
\[\int k \enspace du\]
\[kx+C\]
\[ku+C\]
\[\int {\frac{dx}{x}} \enspace dx\]
\[\int {\frac{du}{u}} \enspace dx\]
\[\ln x+C\]
\[\ln u+C\]
\[\int e^x \enspace dx\]
\[\int e^u \enspace du\]
\[e^x+C\]
\[e^u+C\]
\[\int a^x \enspace dx\]
\[\int a^u \enspace du\]
\[\frac{a^x}{\ln a}+C\]
\[\frac{a^u}{\ln a}+C\]
\[\int \sin x \enspace dx\]
\[\int \sin u \enspace du\]
\[-\cos x+C\]
\[-\cos u+C\]
\[\int \cos x \enspace dx\]
\[\int \cos u \enspace du\]
\[\sin x+C\]
\[\sin u+C\]
\[\int \tan x \enspace dx\]
\[\int \tan u \enspace du\]
\[-\ln |\cos x |+C\]
\[-\ln |\cos u |+C\]
\[\int \frac{1}{\sqrt{1-x²}} \enspace dx\]
\[\int \frac{1}{\sqrt{1-u²}} \enspace du\]
\[\arcsin x+C\]
\[\arcsin u+C\]
\[\int \frac{-1}{\sqrt{1-x²}} \enspace dx\]
\[\int \frac{-1}{\sqrt{1-u²}} \enspace du\]
\[\arccos x+C\]
\[\arccos u+C\]
\[\int \frac{1}{1+x²} \enspace dx\]
\[\int \frac{1}{1+u²} \enspace du\]
\[\arctan x+C\]
\[\arctan u+C\]
La resolució és immediata, la integral d’una de les funcions derivades de la columna esquerra és la funció primitiva que li correspon de la columna de la dreta.
Per la regla de la cadena de derivació de funcions compostes, la integral ha d’encloure \[du\] la derivada d’ \[u\]:
Si hem de resoldre una integral que no és immediata, haurem de descompondre-la en una o més integrals que sí són immediates i després resoldre cadascuna d’aquestes intergrals.
Els procediments de descompondre la integral original en integrals de la taula d’integrals immediates són els mètodes d’integració.
La tria del mètode d’integració dependrà de la funció que volem integrar. L’ordre de verificació del mètode d’integració més adient, és:
Integral immediata (vist en l’apartat anterior)
Integral quasi immediata
Integral per parts
Descomposició en fraccions simples
Trigonomètrica
De substitució
En aquesta entrada veurem com es fan sobretot els mètodes \[1,2,3,4\].
4.1 Integrals quasi immediates
Són integrals que no són immediates però que es poden transformar fàcilment en immediates fent algunes transformacions simples. Es resolen usant la taula d’integrals i les propietats de les integrals. De fet, es resolen per mètodes de susbstitució molt senzills.
La integral \[\int v \; du\] ha de ser més fàcil de resoldre que la integral original \[\int u \; dv\] i el terme de susbstitució \[dv\] ha d’incloure sempre el terme \[dx\] de la integral original.
Exemple:
\[
I=\int \ln x \; dx\\
u=\ln x \rightarrow du=\frac{dx}{x}\\
dv=dx \rightarrow v=\int {dx}=x\\[1cm]
I=\ln x \cdot x-\int{x \frac{dx}{x}}\\
I=\ln x \cdot x-\int{dx}\\
I=\ln x \cdot x-x\\
I=x(\ln x -1)+C\\
\]
De vegades, quan la integral està formada per les funcions \[e^u, \; \sin x/ \cos x\], haurem d’integrar per parts dues o més vegades:
\[
I=\int {e^{x} \, \sin x \; dx} \\
u=\sin x \rightarrow du= \cos x \; dx\\
dv=e^x \; dx \rightarrow v=\int {e^x \; dx}=e^x\\[1cm]
\int {u \; dv}=\int { e^x \; \sin x \; dx}\\
u \cdot v= \sin x \cdot e^x\\
\int {v \; du}=\int e^x \; \cos x \; dx\\[1cm]
I=\sin x \; e^x-\int e^x \; \cos x \; dx\\
I=\sin x \; e^x- \; I_1\\[1cm]
I_1=\int e^x \; \cos x \; dx\\
u=\cos x \rightarrow du= -\sin x \; dx\\
dv=e^x \; dx \rightarrow v=\int {e^x \; dx}=e^x\\[1cm]
I_1= \cos x \; e^x+\int{\sin x \; e^x \; dx}\\
I_1=\cos x \; e^x+I\\
I=\sin x \; e^x-(\cos x \; e^x+I)\\
2I=\sin x \; e^x-\cos x \; e^x\\
I=\frac{e^x(\sin x-\cos x)}{2}
\]
2.4 Per descomposició en fraccions simples
La descomposició en fraccions simples és el procediment invers de l’operació de suma de fraccions algebraiques.
2.4.1 Si N(x) ≥ D(x):
Quan la funció que volem integrar és una funció racional \[f(x)=\frac{N(x)}{D(x)}\] i la integral no es pot resoldre més fàcilment per cap dels mètode anteriors, farem servir aquest mètode, tenint em compte que:
\[N(x)\] és el polinomi del numerador, \[D(x)\] és el polinomi del denominador, \[q(x)\] és el polinomi del quocient i \[r(x)\] és el polinomi residu de la divisió polinòmica.
Per a resoldre la integral, farem el següents passos:
Farem la divisió polinòmica \[\frac{N(x)}{D(x)}\].
Descompondrem la funció f(x) en dues o més integrals: \[q(x)+\frac{r(x)}{D(x)}\].
Com que no és possible fer la divisió polinòmica, farem la descomposició en fraccions parcials. Recordeu que la descomposició en fraccions parcials és el procediment invers de l’addició de fraccions.
La seqüència del procediment és la següent:
Exemple:
1.Factoritzarem el denominador de la funció racional fins a obtenir-ne polinomis irreductibles. Els factors seran, o bé binomis lineals (x+a), o bé polinomis quadràtics irreductibles (ax²+bx+c).
2.Transformarem la funció racional en diferents fraccions de la següent manera: la fracció que correspon a cada factor lineal (x+a) és \[\ \frac{A}{(x+a)}\] (A és un valor constant). La fracció que correspon a cada factor quadràtic (ax²+bx+c) és \[\frac{Ax+B}{(ax²+bx+c)}\]. En ambdós casos, a cada factor li corresponen tantes fraccions com multiplicitat o nombre de solucions múltiples tingui el factor.
En aquest mètode es modifica la funció \[f(x)\] substituint-ne una part per una expressió algebraica perquè la funció resultant sigui més fàcil d’integrar. Aquests expressió es funció d’una nova variable independent \[g(t)\].
El mètode de substitució o de canvi de variable per a calcular primitives té el seu origen en la regla de la cadena per a derivades.
El procediment per a aquest mètode és:
1.Trobar el canvi de variable adient que transformi la funció \[f(x)\] en una altra de més senzilla. 2.Calculem la funció \[g(t)\] que resulta de fer el canvi de variable i substituim \[f(x)\] per aquesta funció. 3.Fent servir el canvi de variable, calculem i substituim \[dx\]. 4.Resolem la integral \[\int {g(t) \; dt}\]. 5.Desfem el canvi.
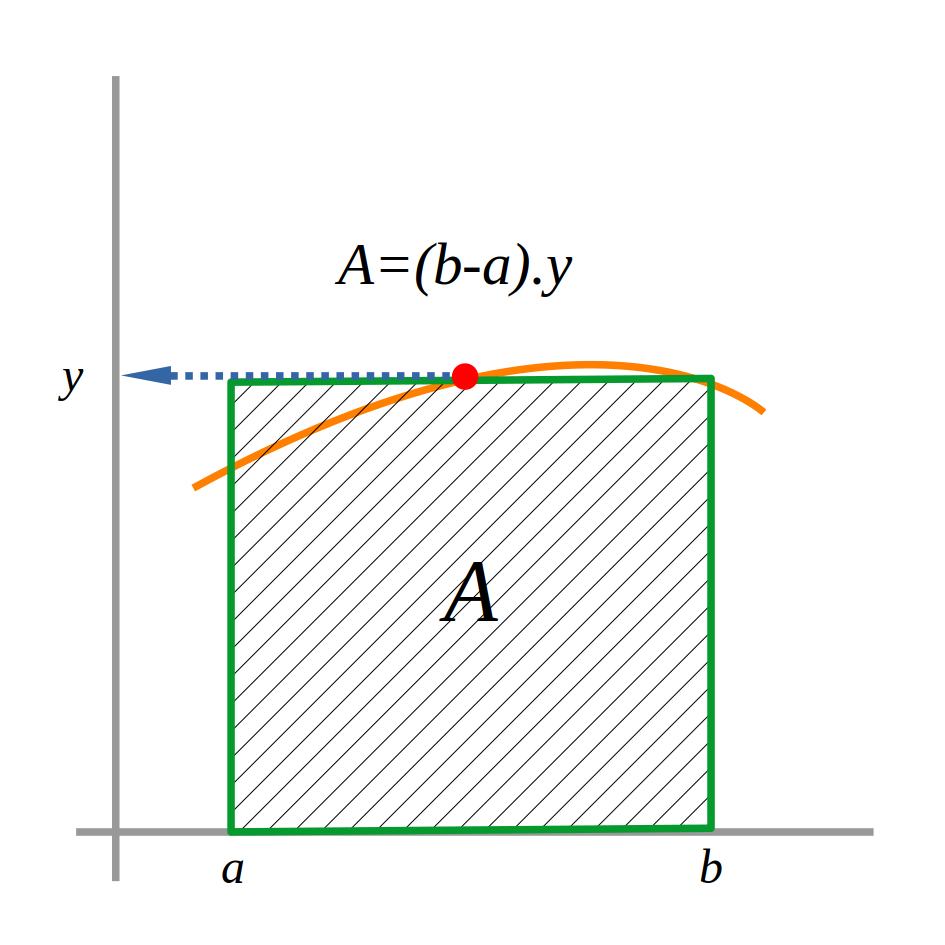
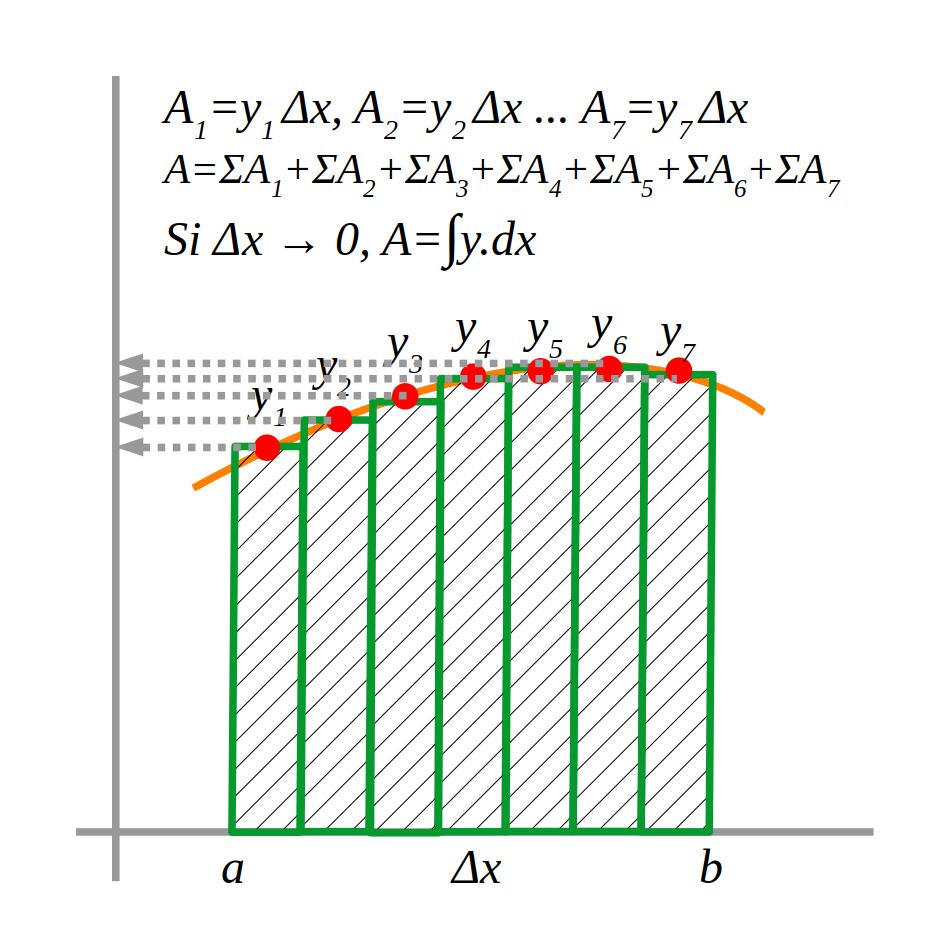
Una integral definida és la integració d’una funció \[f(x)\] en un interval del seu domini: \[A=\int_{a}^{b}{f(x)\; dx}\].
\[a,b\] són els límits inferior i superior de l’interval.
El valor \[A\] de la integral representa l’àrea tancada per la funció entre els límits \[a,b\] i l’eix \[OX\].
Si calculem l’àrea que hi ha dessota de la funció (línia carabassa) aproximant-la a la del rectangle verd, podríem fer un error important. Però si dividim l’àrea en rectangles petits, calculem l’àrea de cadascun, i en fem la suma, el resultat serà més aproximat i l’error més petit. El cálcul serà més precís com més estrets siguin els rectangles. Si l’amplada dels rectangles és infinitesimal (infinitament petita), el resultat serà pràcticament exacte ( \[dx=\Delta x \rightarrow 0\]).
3.1 Regla de Barrow
Per fer el cálcul d’una intergral definida usem la regla de Barrow (el segon teorema fonamental del càlcul:
La programació lineal és la part de les matemàtiques que determina el valor de les variables restringides \[x, y\] d’una funció \[f(x,y)\] que es vol maximitzar o minimitzar. La funció i les restriccions són funcions lineals.
(Vegeu també l’entrada Inequacions per a saber-ne més)
2. Resolució
Els passos per a resoldre els exercicis de programació lineal són:
Es llegeix atentament l’exercici per tal de plantejar l’equació de la funció i el sistema d’inequacions de les restriccions.
S’escriu l’equació de la funció que es vol optimitzar i les inequacions de les restriccions: la pregunta de l’exercici ens indica quines són les variables que hem de calcular. Per tant, assignarem les incògnites \[x,y\] a aquestes variables per a construir la taula de restriccions.
Dibuixem la regió factible delimitada pel sistema d’inequacions.
Calculem els vèrtexs de la regió factible.
Introduïm el valor de cada vèrtex a la funció i en calculem el valor.
Determinem el valor de la funció més gran (màxim) o més petit (mínim).
Exemple (PAU juny 2001):
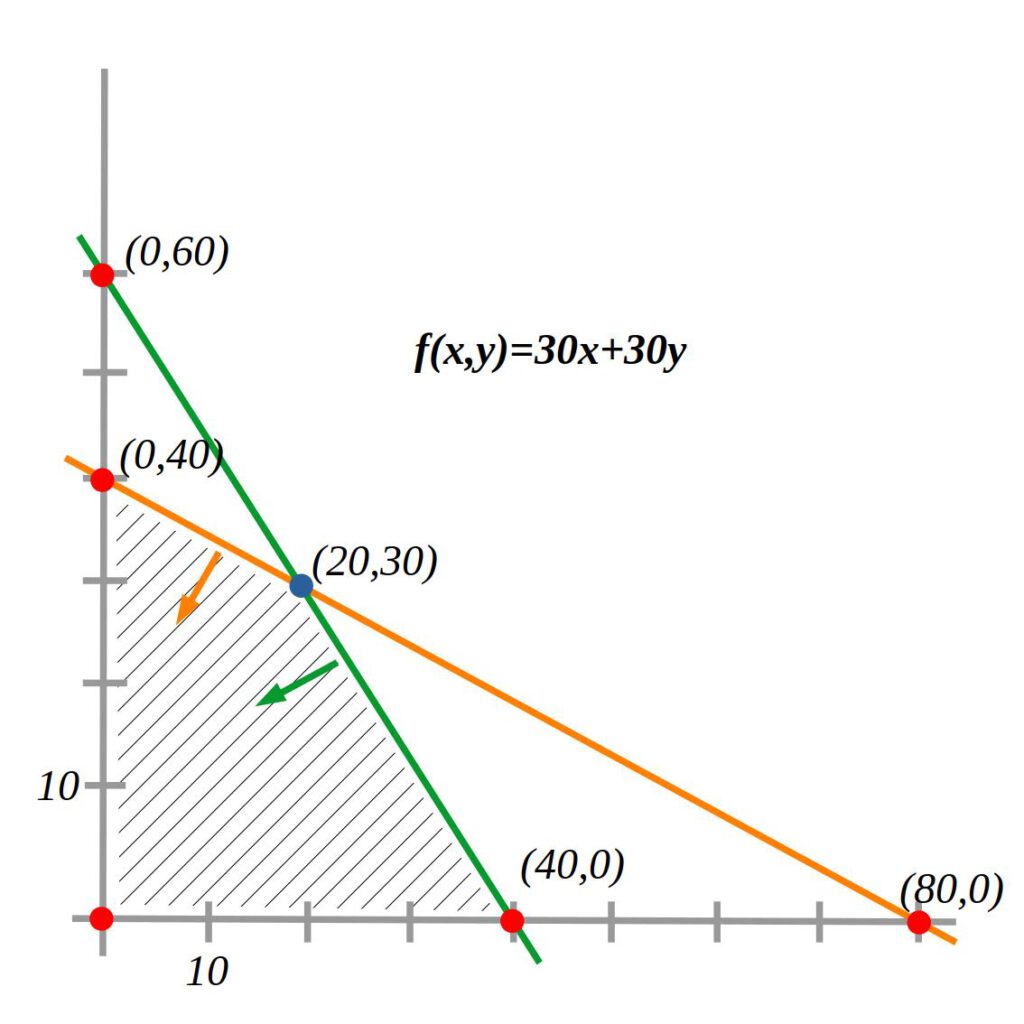
En un taller de confecció es disposa de 80 metres quadrats de tela de cotó i de 120 metres quadrats de tela de llana. Es fan dos tipus de vestits, A i B. Per fer un vestit del tipus A es necessita 1 metre quadrat de cotó i 3 metres quadrats de llana; en canvi, per un vestit del tipus B calen 2 metres quadrats de cada tipus de tela.
a) Quants vestits de cada tipus s’han de fer per obtenir un benefici total màxim si per cada vestit (sigui del tipus que sigui) es guanyen 30 euros?
b) Quina seria la conclusió a la pregunta anterior si per cada vestit del tipus A es guanyen 30 euros i, en canvi, per cada un del tipus B només es guanyen 20 euros.
2.
Nombre de vestits A: \[x\] Nombre vestits B: \[y\]
Funció objectiu: \[f(x,y)=30x+30y\]
Taula de restriccions:
A
B
m²
Llana
\[3x\]
\[2y\]
\[\leq 120\]
Cotó
\[1x\]
\[2y\]
\[\leq 80\]
3.
Per a delimitar la regió factible, dibuixarem la funció lineal de cada inequació.
Cada funció divideix el pla en dos semiplans. Per a determinar quin és el semiplà solució, substituirem un punt qualsevol del pla en la inequació. El punt que triem no ha de ser un punt de les rectes de les inequacions. Normalment agafem el (0,0) per comoditat de càlcul.
Si es compleix la inequació, el semiplà solució és el pla al qual pertany el punt anterior, sinó és l’altre.
Farem el mateix procediment per a cada inequació. La regió comuna als semiplans és la regió factible.
Qué diferencia las clases de refuerzo de CEEdukat de las clases particulares a domicilio?
A pesar que las clases particulars a domicilio son populares, ir a una academia para hacer clases de refuerzo tiene algunas ventajas que las clases particulares a domicilio no pueden ofrecer.
Por esta razón, queremos exponer las principales características de las clases de refuerzo de CEEdukat:
En CEEdukat hace once años que ayudamos con clases de refuerzo a los estudiantes de primaria, ESO y bachillerato y a gente adulta a comprender y superar los retos de estudio de la enseñanza actual.
Somos especialistas en refuerzo escolar!
Ambiente de estudio sin distracciones para el estudiante. La experiencia nos ha demostrado que en las clases particulars a domicilio el estudiante tiene muchas distracciones y no se concentra en el estudio. El aula de CEEdukat, sin embargo, es un ambiente de estudio que permite la concentración de los estudiantes sin distracciones.
Las clases de refuerzo de CEEdukat son en grupos reducidos y se atiende a cada estudiante de forma indivudial y personalizada.
Además, respetamos las disposiciones legales y medidas de seguridad vigentes.
Horarios amplios y flexibles:
Abrimos por las mañana, por la tarde y los sábados por la mañana para que se pueda escoger el horario más adecuado. También abrimos en Navidad y Semana Santa.
Recuperación de clases:
Si no se puede asistir a clase algún día, se puede recuperar el día del mes que más convenga y así nunca se perderán horas de refuerzo.
Precios ajustados:
Tenemos paquetes mensuales de horas de refuerzo con tarifas ajustadas y variables para podáis estudiar y planificar el tiempo de estudio a vuestro ritmo.
Los precios de CEEdukat suelen ser más económicos que los de las clases particulares a domicilio porque no cobramos el desplazamiento y podemos atender más estudiantes cada hora.
Clases presenciales y virtuales:
Las restricciones impuestas a las academias a causa de la pandemia COVID-19 nos han forzado a desarrollar métodos de enseñanza virtuales de la misma calidad y eficiencia que las presenciales. No notaríais la diferencia entre uno y otro método.
En CEEdukat sentimos pasión por la enseñanza!
Soliciten más información enviando este formulario:
Què diferencia les classes de reforç de CEEdukat de les classes particulars a domicili?
Tot i que les classes particulars a domicili són populars, anar a una acadèmia a fer classes de reforç té algunes avantatges que no poden oferir les particulars a domicili.
És per això, que volem exposar les característiques principals de les classes de reforç de CEEdukat:
A CEEdukat fa onze anys que ajudem als estudiants de primària, ESO i batxillerat i a gent adulta a comprendre i superar els reptes d’estudi de l’ensenyament actual.
Som especialistes en reforç escolar!
Ambient d’estudi sense distraccions per a l’estudiant L’experiència ens ha ensenyat que, en les classes particulars a domicili, l’estudiant té moltes distraccions i no es concentra en l’estudi. L’aula de CEEdukat, en canvi, és un ambient d’estudi que permet la concentració de l’estudiant sense distraccions.
Les classes de reforç de CEEdukat són en grups reduïts i s’atén a cada estudiant de forma individual i personalitzada.
A més, respectem les disposicions legals i mesures de seguretat vigents.
Horaris amplis i flexibles:
Obrim els matins, les tardes i dissabtes al matí perquè pugueu triar l’horari més adequat. També obrim per Nadal i Setmana Santa.
Recuperació de classes:
Si un dia no podeu venir a classe de reforç, podeu recuperar-la el dia del mes que us vagi més bé i no haureu de perdre mai hores.
Preus ajustats:
Tenim paquets mensuals d’hores de reforç amb tarifes ajustades i variables perquè pugueu estudiar i planificar-vos l’estudi al vostre ritme.
Els preus de CEEdukat solen ser més ajustats que els de les classes particulars a domicili perquè no hem cobrar el desplaçament i els professors poden atendre més estudiants per hora.
Classes presencials i en línia:
Les restriccions imposades a les acadèmies a causa de la pandèmia del COVID-19 ens han fet desenvolupar mètodes d’ensenyament en línia de la mateixa qualitat i eficiència que les classes presencials. No notaríeu la diferència entre un mètode d’ensenyament i l’altre.
A CEEdukat sentim passió per l’ensenyament!
Demaneu-nos més informació enviant aquest formulari:
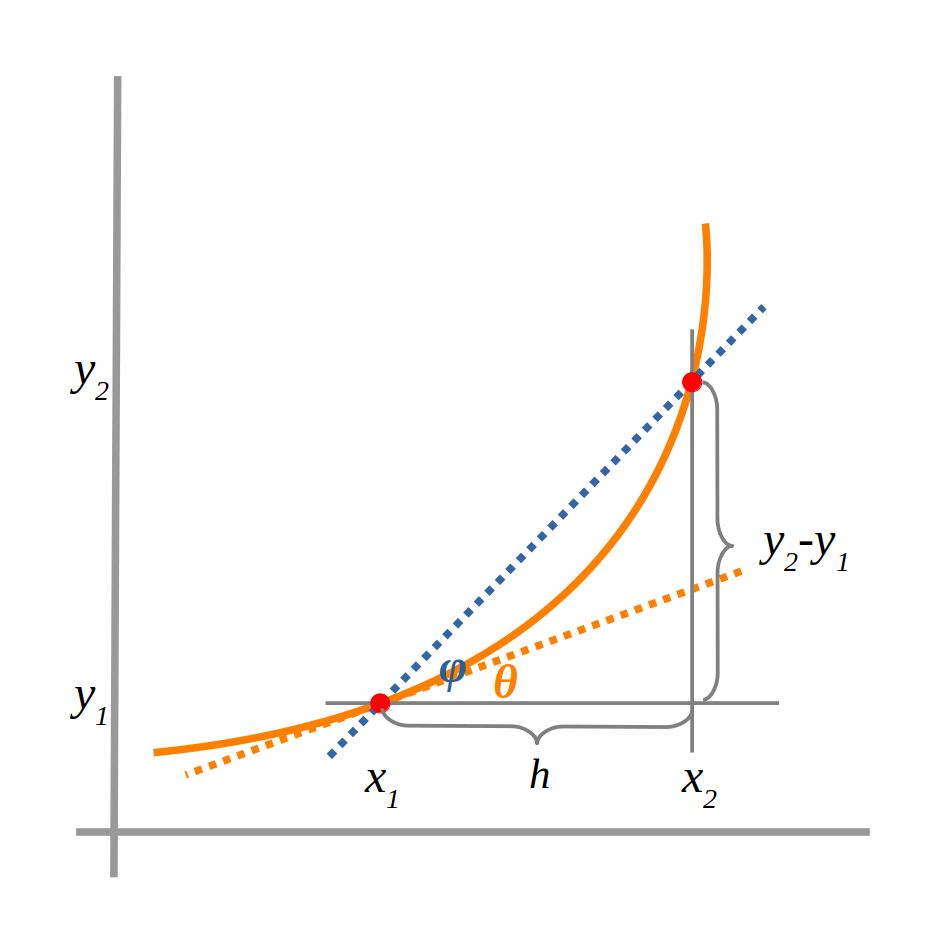
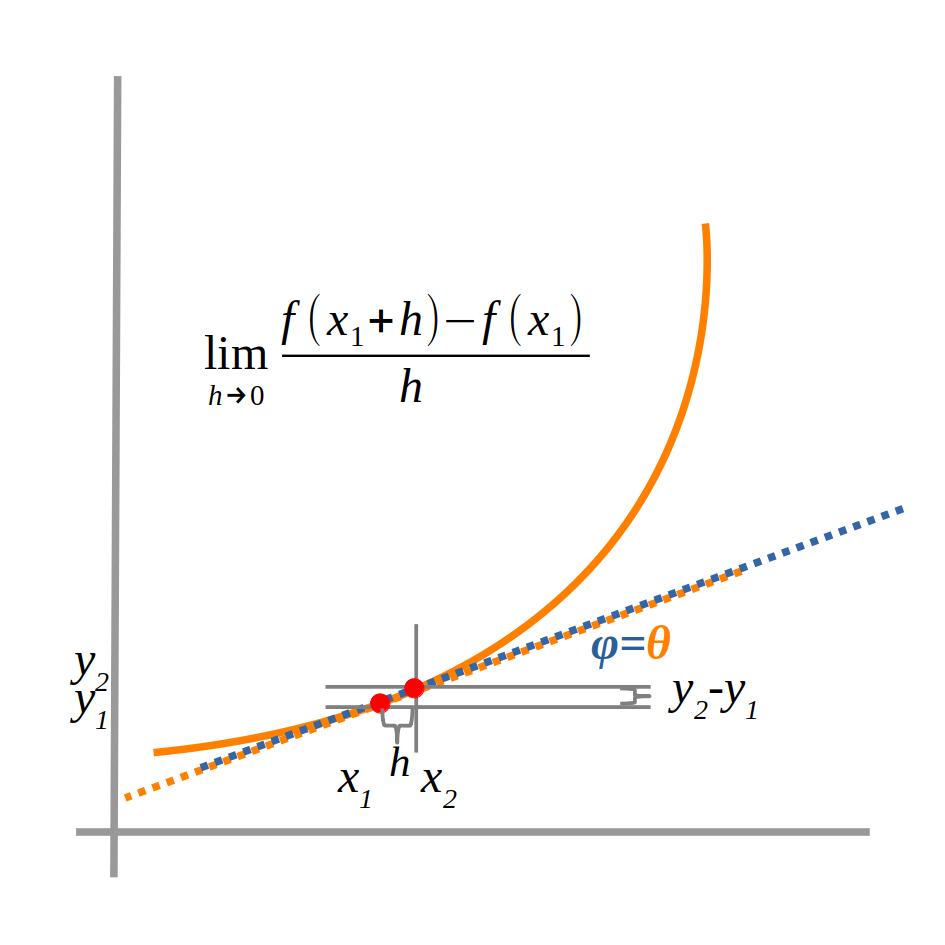
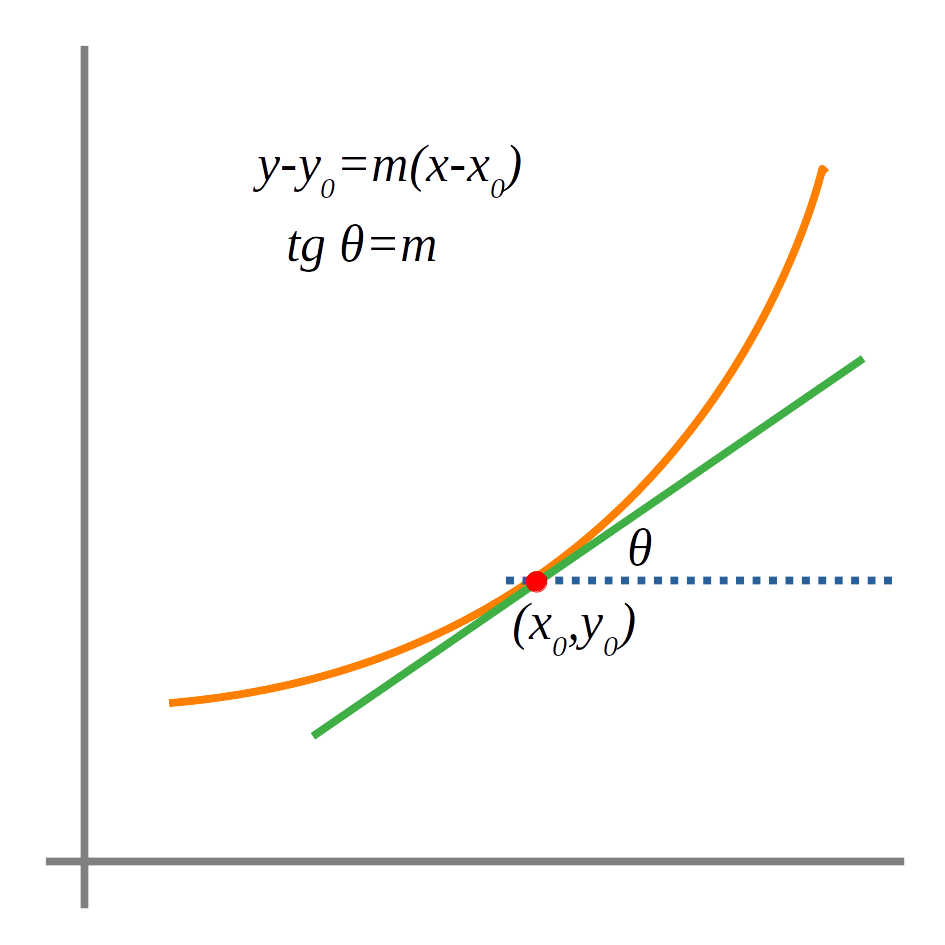
La derivada d’una funció en un punt és el valor del pendent de la recta tangent en aquest punt.
El pendent o la inclinació (\[\varphi\]) de la línia de color blau (taxa de variació mitjana) és \[\frac{y_2-y_1}{x_2-x_1}\].
Però aquesta inclinació no coincideix amb la inclinació de la recta tangent en el punt de tangència \[x_1\] (línia de color carabassa). Les inclinacions coincidiran quan la diferència entre \[x_2\] i \[x_1 \enspace (h)\] sigui infinitament petita.
Ara bé, si introduïm cadascuna de les funcions elementals en el la fórmula de la definició de derivada anterior i fem els càlculs necessaris, el resultat que obtenim és la funció derivada. La funció derivada és la funció que ens informa del pendent de la funció primitiva o sense derivar en qualsevol punt.
D’aquesta manera, obtenim la taula de derivades de les funcions elementals:
\[f(x)\]
\[f'(x)\]
\[y=k\]
\[y’=0\]
\[y=x\]
\[y’=1\]
\[y=kx\]
\[y’=k\]
\[y=x^n\]
\[y’=nx^{(n-1)}\]
\[y=\ln x\]
\[y’=\frac{1}{x}\]
\[y=e^x\]
\[y=e^x\]
\[y=\log_a x\]
\[y’=\frac{1}{x.ln a}\]
\[y=a^x\]
\[y=a^x. \ln a\]
\[y=\sin x\]
\[y’=\cos x\]
\[y=\cos x\]
\[y’=-\sin x\]
\[y=\tan x\]
\[y’=sec²x\]
\[y=\arcsin x\]
\[y’=\frac{1}{\sqrt{1-x²}}\]
\[y=\arccos x\]
\[y’=-\frac{1}{\sqrt{1-x²}}\]
\[y=\arctan x\]
\[y’=\frac{1}{1+x²}\]
2. Propietats de les derivades:
Les propietats de les derivades són:
a) Derivada d’una suma/ diferència de funcions: \[[f(x)+g(x)]’=f'(x)+g'(x)\]
b) Derivada d’un producte de funcions: \[[f(x) \cdot g(x)]’=f'(x) \cdot g(x)+f(x) \cdot g'(x)\]
c) Derivada d’un quocient de funcions: \[[\frac{f(x)}{g(x)}]’=\frac{f'(x) \cdot g(x)-f(x) \cdot g'(x)}{[g'(x)]²}\]
3. Regla de la cadena
Si \[f(x)\] i \[g(x)\] són dues funcions derivables i \[h(x)\] és la funció composta d’aquestes dues funcions, la derivada d’ \[h(x)=f(x) ∘ g(x)= f[g(x)]\] és \[h'(x)=f'[g(x)] \cdot g'(x)\].
Per tant, la taula de derivades d’una funció composta és:
\[h(x)\]
\[h'(x)\]
\[y=k\]
\[y’=0\]
\[y=k \cdot h(x)\]
\[y’=k \cdot h'(x)\]
\[y=h(x)^n\]
\[y’=n \cdot h(x)^{n-1} \cdot h'(x)\]
\[y=\ln h(x)\]
\[y’=\frac{h'(x)}{h(x)}\]
\[y=e^{h(x)}\]
\[y=e^{h(x)} \cdot h'(x)\]
\[y=\log_a h(x)\]
\[y’=\frac{h'(x)}{h(x).ln a}\]
\[y=a^{h(x)}\]
\[y=a^{h(x)} \cdot \ln a \cdot h'(x)\]
\[y=\sin h(x)\]
\[y’=\cos h(x) \cdot h'(x)\]
\[y=\cos h(x)\]
\[y’=-\sin h(x) \cdot h'(x)\]
\[y=\tan h(x)\]
\[y’=sec²h(x) \cdot h'(x)\]
\[y=\arcsin h(x)\]
\[y’=\frac{h'(x)}{\sqrt{1-h²(x)}}\]
\[y=\arccos h(x)\]
\[y’=-\frac{h'(x)}{\sqrt{1-h²(x)}}\]
\[y=\arctan h(x)\]
\[y’=\frac{h'(x)}{1+h²(x)}\]
4. Aplicacions de les derivades
4.1 Monotonia i punts crítics d’una funció
La monotonia d’una funció es refereix al creixement i decreixement de la funció en cada interval del domini.
Els punts crítics d’una funció són els punts que anul·len la primera derivada (\[y’=0\]). Aquests punts són els possibles màxims, mínims i punts d’inflexió de la funció.
4.1.1 Monotonia, màxims i mínims
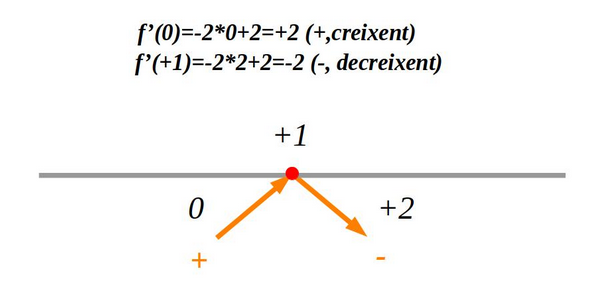
Els màxims i mínims són els punts en els quals canvia la monotonia o creixement de la funció.
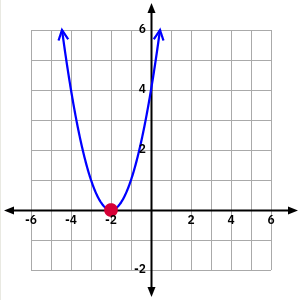
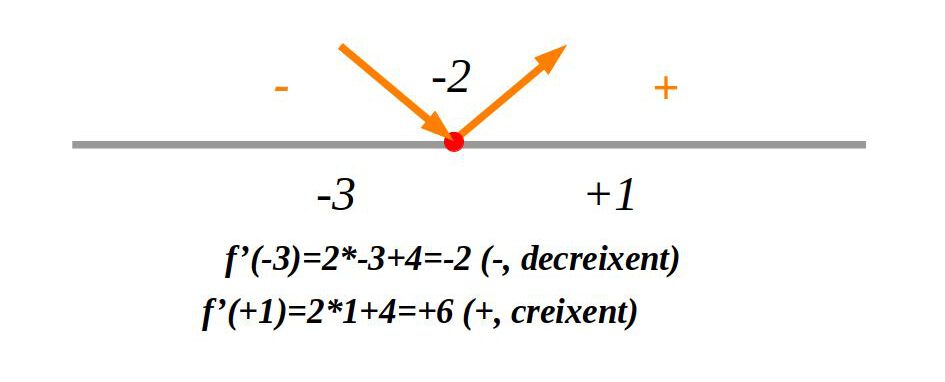
El punt en el qual la monotonia de la funció canvia de decreixent a creixent, és un mínim. En aquest punt, la inclinació o pendent és zero, abans d’aquest punt és negativa i després és positiva.
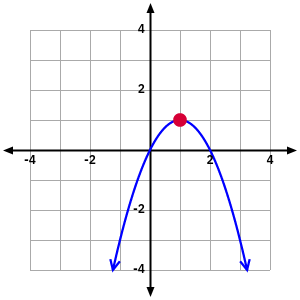
El punt en el qual la monotonia de la funció canvia de creixent a decreixent, és un màxim. En aquest punt, la inclinació o pendent és zero, abans d’aquest punt és positiva i després és negativa.
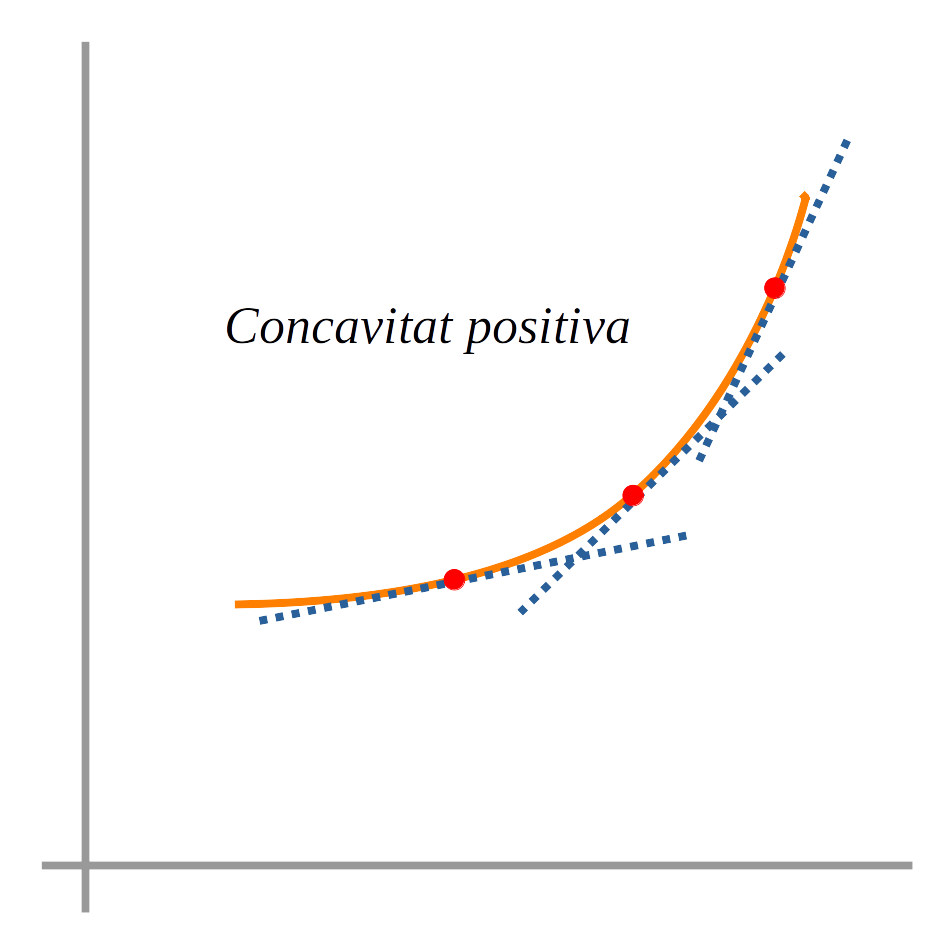
Els punts d’inflexió són els punts en els quals canvia la curvatura de la funció. La curvatura indica el canvi de direcció de les tangents d’una funció entre dos punts de tangència.
La curvatura en un interval és positiva si la la gràfica de la funció està per sobre la de la recta tangent.
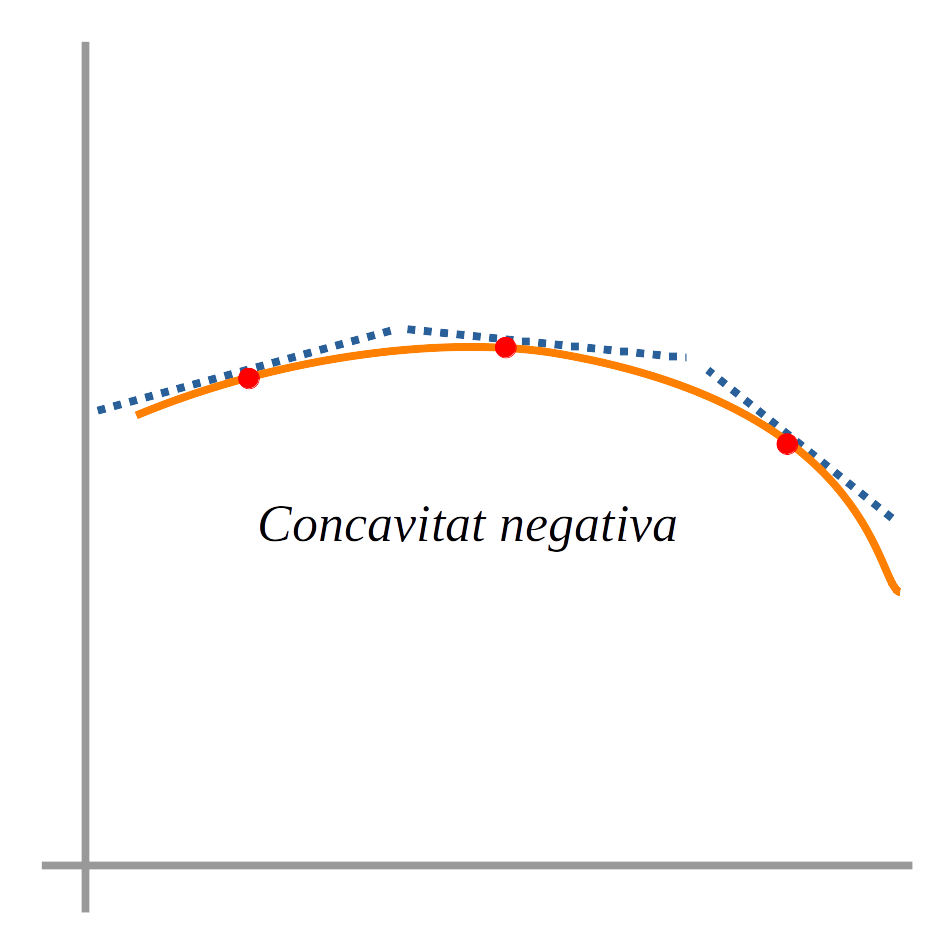
La curvatura en un interval és negativa quan la gràfica de la funció està per sota de la recta tangent.
Si una funció té curvatura positiva en un interval, tindrà un punt mínim en aquest interval. Si una funció té curvatura negativa en un interval, tindrà un màxim en aquest interval.
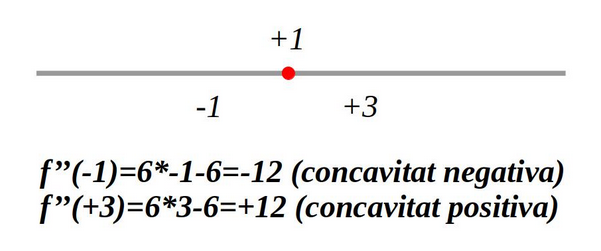
Per a determinar els punts d’inflexió, farem la segona derivada igual a zero \[y”=0\]. Si hi ha un canvi de signe (concavitat) en un punt, aquest punts és un punt d’inflexió.
Una altra manera de determinar si un punt singular és un màxim o un mínim, es fent la segona derivada i determinant el signe en aquest punt: si és positiu serà un mínim i si és negatiu serà un màxim.
És trobar els valors de les variables de la funció objectiu (funció que es vol maximitzar o minimitzar) tenint en compte les restriccions (limitació dels valors de les variables).
Per a resoldre els exercicis d’optimització farem:
Analitzant la geometria plantejarem l’equació de la funció objectiu i de la restricció.
Aïllarem una de les incògnites de la restricció (la que faci els càlculs posteriors més senzills) i la substituïrem a la función objectiu.
Farem la primera derivada de la funció objetiu i la igualarem a zero.
Resoldrem l’equació que en resulti.
Substituint el resultat a la restricció trobarem el valor de la segona incògnita.
Calcularem el valor de la funció objectiu.
Determinarem si és un màxim o un mínim.
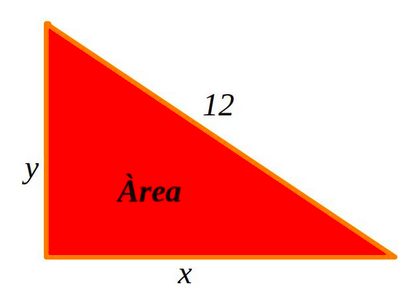
Exemple:
Hem de determinar quins valors de la longitud dels catets d’un triangle rectangle fan que l’àrea sigui màxima tenint en compte que la hipotenusa ha de fer 12 unitats de longitud:
Usem galetes per oferir una experiència més relevant al recordar les vostres preferències y visites. Polsant ACCEPTAR, consentiu l'ús de TOTES les galetes..
Aquest lloc web utilitza cookies per millorar la vostra experiència mentre navegueu pel lloc web. D’aquestes, les cookies que es classifiquen com a necessàries s’emmagatzemen al vostre navegador, ja que són essencials per al funcionament de les funcionalitats bàsiques del lloc web.
També fem servir cookies de tercers que ens ajuden a analitzar i entendre com utilitzeu aquest lloc web. Aquestes cookies s’emmagatzemaran al vostre navegador només amb el vostre consentiment. Teniu l’opció de desactivar aquestes cookies, però això pot afectar la vostra experiència de navegació.
Les galetes necessàries són absolutament essencials perquè el lloc web funcioni correctament. Aquesta categoria només inclou galetes que garanteixen funcionalitats bàsiques i funcions de seguretat del lloc web. Aquestes galetes no emmagatzemen cap informació personal.
Les galetes que no siguin especialment necessàries perquè el lloc web funcioni i s\'utilitzi específicament per recopilar dades personals de l\'usuari a través d\'analítiques, anuncis, altres continguts incrustats es desmenten com a galetes no necessàries. És obligatori obtenir el consentiment de l\'usuari abans d\'executar aquestes galetes al seu lloc web.






 RSS CEEdukat
RSS CEEdukat
